In this chapter, we look at oscillating systems that undergo “simple harmonic motion”, such as the motion of a mass attached to a spring. Many systems in the physical world, such as an oscillating pendulum, can be described by the same mathematical formalism that describes the motion of a mass attached to a spring.
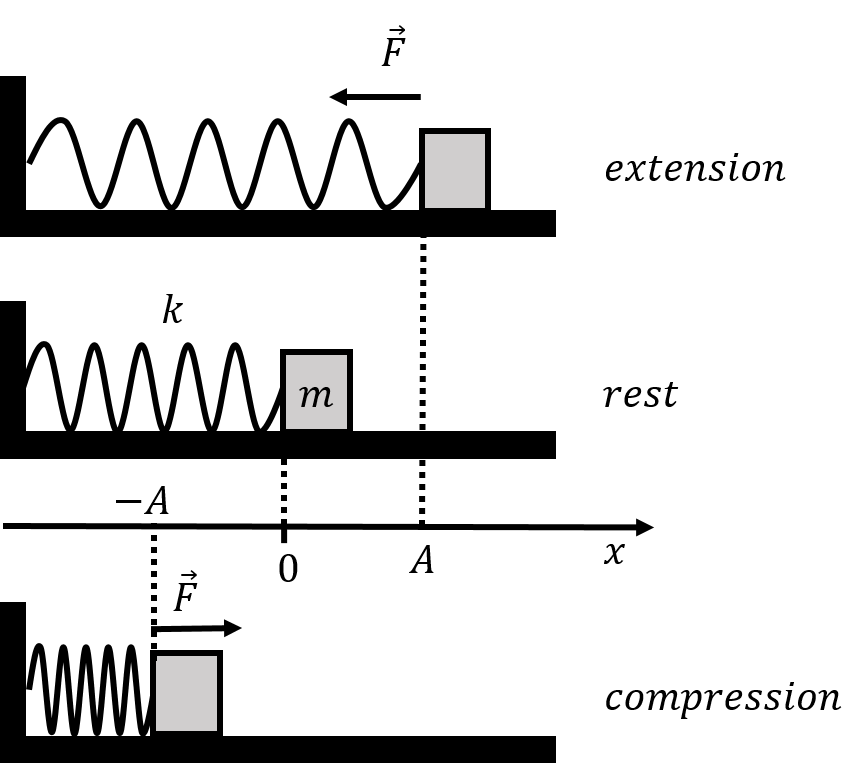
As an example of simple harmonic motion, we first consider the motion of a block of mass m that can slide without friction along a horizontal surface. The mass is attached to a spring with spring constant k which is attached to a wall on the other end. We introduce a one-dimensional coordinate system to describe the position of the mass, such that the x axis is co-linear with the motion, the origin is located where the spring is at rest, and the positive direction corresponds to the spring being extended. This “spring-mass system” is illustrated in Figure 1.
Figure 1:A horizontal spring-mass system oscillating about the origin with an amplitude A.
We assume that the force exerted by the spring on the mass is given by Hooke’s Law:
where x is the position of the mass. The only other forces exerted on the mass are its weight and the normal force from the horizontal surface, which are equal in magnitude and opposite in direction. Therefore, the net force on the mass is the force from the spring.
As we saw in Section Section 8.5, if the spring is compressed (or extended) by a distance A relative to the rest position, and the mass is then released, the mass will oscillate back and forth between x=±A[32], which is illustrated in Figure 1 and simulated in Figure 2. We call A the “amplitude of the motion”. When the mass is at x=±A, its speed is zero, as these points correspond to the location where the mass “turns around”.
Figure 2:A mass attached to a spring on a horizontal, frictionless surface.
In Figure 2, the amplitude A, mass m, and spring constant k can adjusted in the Starting Parameters to see how they affect the motion of the mass. Create a hypothesis for how increasing each of these variables affects the motion of the mass, and then test increasing each variable in in the simulation. Are your hypotheses supported? Read on to see why these variables have the effects they do.
We can describe the motion of the mass using energy, since the mechanical energy of the mass is conserved. At any position, x, the mechanical energy, E, of the mass will have a term from the potential energy, U, associated with the spring force, and kinetic energy, K:
We can find the mechanical energy, E, by evaluating the energy at one of the turning points. At these points, the kinetic energy of the mass is zero, so E=U(x=A)=1/2kA2. We can then write the expression for mechanical energy as:
We can use Newton’s Second Law to obtain the position, x(t), velocity, v(t), and acceleration, a(t), of the mass as a function of time. The x component of Newton’s Second Law for the mass attached to the spring can be written:
We can write the acceleration in Newton’s Second Law more explicitly as the second derivative of the position, x(t), with respect to time. If we do this, we can see that Newton’s Second Law for the mass attached to the spring is a differential equation for the function x(t) (we call it an “equation of motion”):
We want to find the position function, x(t). Equation (6) tells us that the second derivative of x(t) with respect to time must equal the negative of the x(t) function multiplied by a constant, k/m. Without having taken a course on differential equations, it might not be obvious what the function x(t) could be. Several, equivalent functions can satisfy this equation. One possible choice, which we present here as a guess, is\footnote{Other possible guesses that work are Asin(ωt+ϕ), and x(t)=Acos(ωt)+Bsin(ωt).}:
where A, ω, and ϕ are constants that we need to determine. We can take the second order derivative with respect to time of the function above to verify that it indeed “solves” the differential equation:
We call ω the “angular frequency” of the spring-mass system. We have found that our guess for x(t) satisfies the differential equation.
We still need to identify what the constants A and ϕ have to do with the motion of the mass. The constant A is the maximal value that x(t) can take (when the cosine is equal to 1). This corresponds to the amplitude of the motion of the mass, which we already had labelled, A. The constant, ϕ, is called the “phase” and depends on when we choose t=0 to be. Suppose that we define time t=0 to be when the mass is at x=A; in that case:
If we define t=0 to be when the mass is at x=A, then the phase, ϕ, is zero. In general, the value of ϕ can take any value between −π and +π[33] and, physically, corresponds to our choice of when t=0 (i.e. the position of the mass when we choose t=0).
Since we have determined the position as a function of time for the mass, its velocity and acceleration as a function of time are easily found by taking the corresponding time derivatives:
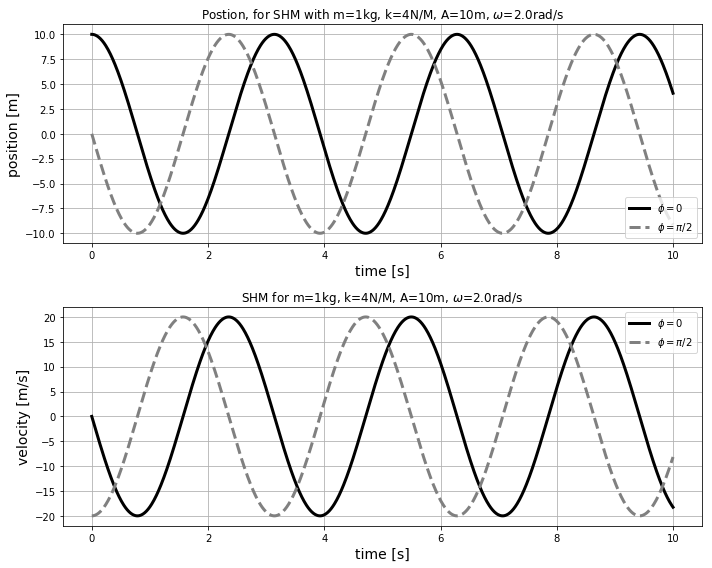
The position of the mass is described by a sinusoidal function of time; we call this type of motion “simple harmonic motion”. The position and velocity as a function of time for a spring-mass system with m=1kg, k=4N/m, A=10m are shown in Figure 3 for two different choices of the phase, ϕ=0 and ϕ=π/2.
Figure 3:Position and velocity as a function of time for a mass-spring system for two different values of the phase, ϕ.
We can make a few observations about the position and velocity illustrated in Figure 3:
Changing the phase, ϕ, results in an horizontal shift of the functions. A positive phase results in a shift of the functions to the left.
The highest speed corresponds to a position of x=0 and the largest position, x=±A, corresponds to a speed of zero.
ϕ=0 corresponds to the “initial condition” at t=0, where the position of the mass is x=A and its speed is v=0.
ϕ=π/2 corresponds to the “initial condition” at t=0, where the position of the mass is x=0 and its velocity is in the negative direction, and with maximal amplitude.
The position is always between x=±A, and the velocity is always between v=±Aω.
The motion of the spring is clearly periodic. If the period of the motion is T, then the position of the mass at time t will be the same as its position at t+T. The period of the motion, T, is easily found:
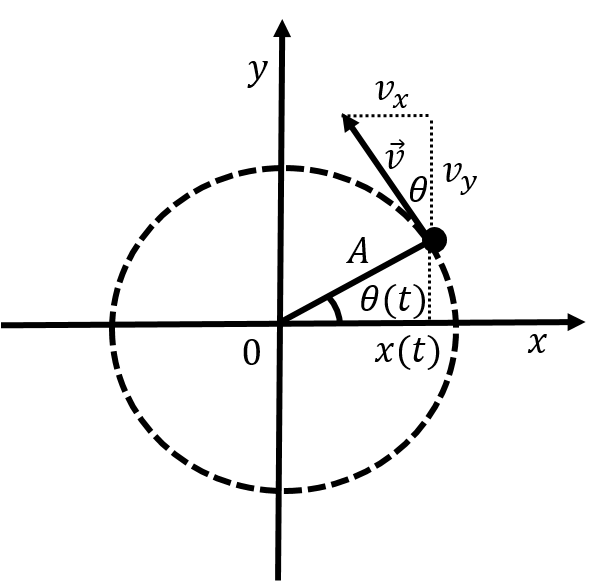
We can make an analogy between the mathematical description of the motion of a spring-mass system and that of uniform circular motion. Consider a particle that is moving along a circle of radius A, with constant angular speed ω, as illustrated in Figure 4.
Figure 4:Uniform circular motion of a particle along a circle of radius A with constant angular speed ω.
The angular position, θ(t), of the particle is given by:
We can see that the x coordinate of the particle has the same functional form as the position for simple harmonic motion. The same is true for the particle’s velocity. The magnitude of the particle’s velocity is given by:
We can visualize simple harmonic motion as if it were the projection onto the x axis of uniform circular motion with angular speed ω about a circle with radius A. The phase ϕ corresponds to the angular position of the particle around the circle, θ0, at time t=0. When the particle crosses the y axis (x=0), its velocity is in the x direction, so the x component of the velocity is maximal. When the particle crosses the x axis (x=±A), the x component of the velocity is zero.
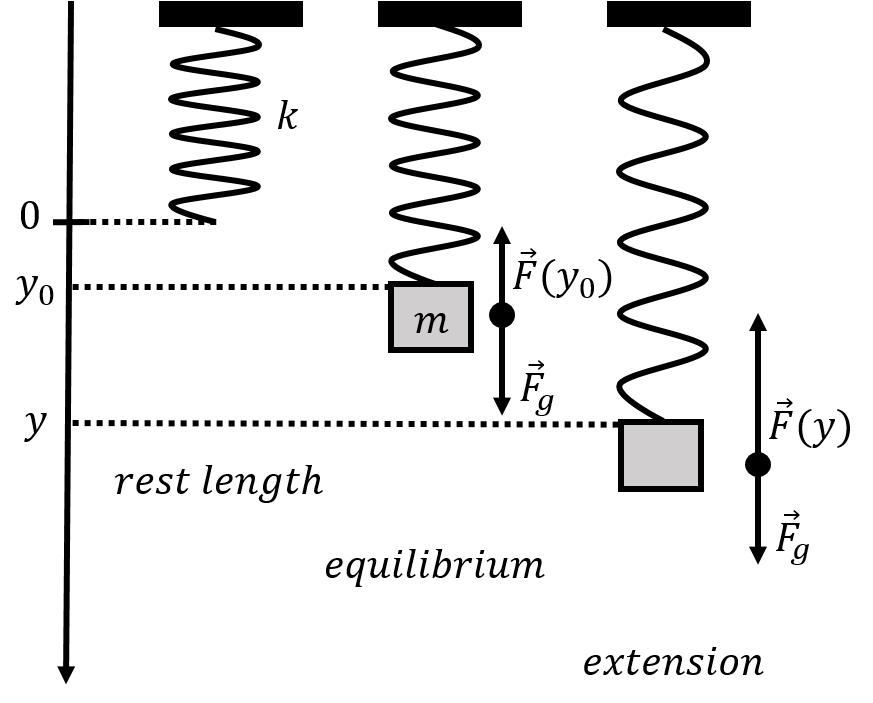
When no mass is attached to the spring, the spring is at rest (we assume that the spring has no mass). We choose the origin of a one-dimensional vertical coordinate system (y axis) to be located at the rest length of the spring (left panel of Figure 6). When a mass m is attached to the spring, the spring will extend and the end of the spring will move to a new equilibrium position, y0, given by the condition that the net force on the mass m is zero. The only forces exerted on the mass are the force from the spring and its weight. The condition for the equilibrium is thus:
Now, consider the forces on the mass at some position y when the spring is extended downwards relative to the equilibrium position (right panel of Figure 6). Newton’s Second Law at that position can be written as:
Note that the net force on the mass will always be in the direction so as to “restore” the position of the mass back to the equilibrium position, y0. If the mass had been moved upwards relative to y0, the net force would be downwards.
We can substitute the equilibrium condition, mg=ky0, into the equation that we obtained from Newton’s Second Law:
Consider a new variable, y′=y−y0. This is the same as defining a new y′ axis that is shifted downwards by y0; in other words, this the same as defining a new y′ axis whose origin is at y0 (the equilibrium position) rather than at the position where the spring is at rest. Noting that the second time derivative of y′(t) is the same as that for y(t):
This is the same equation as that for the simple harmonic motion of a horizontal spring-mass system (6), but with the origin located at the equilibrium position instead of at the rest length of the spring. In other words, a vertical spring-mass system will undergo simple harmonic motion in the vertical direction about the equilibrium position. In general, a spring-mass system will undergo simple harmonic motion if a constant force that is co-linear with the spring force is exerted on the mass (in this case, gravity). That motion will be centred about a point of equilibrium where the net force on the mass is zero rather than where the spring is at its rest position.
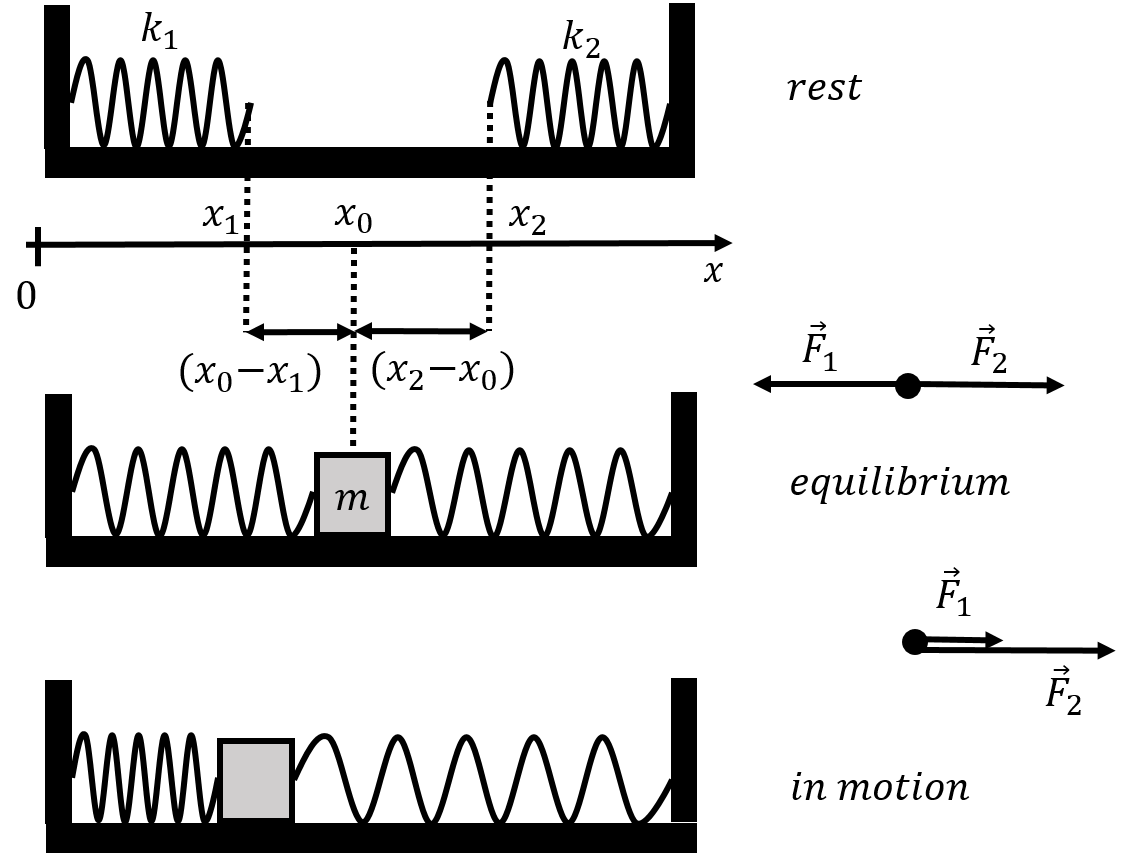
Consider a horizontal spring-mass system composed of a single mass, m, attached to two different springs with spring constants k1 and k2, as shown in Figure 7.
Figure 7:A mass attached to two different springs.
We introduce a horizontal coordinate system, such that the end of the spring with spring constant k1 is at position x1 when it is at rest, and the end of the k2 spring is at x2 when it is as rest, as shown in the top panel. A mass m is then attached to the two springs, and x0 corresponds to the equilibrium position of the mass when the net force from the two springs is zero. We will assume that the length of the mass is negligible, so that the ends of both springs are also at position x0 at equilibrium. You can see in the middle panel of Figure 7 that both springs are in extension when in the equilibrium position. It is possible to have an equilibrium where both springs are in compression, if both springs are long enough to extend past x0 when they are at rest.
If we assume that both springs are in extension at equilibrium, as shown in the figure, then the condition for equilibrium is given by requiring that the sum of the forces on the mass is zero when the mass is located at x0. The extension of the spring on the left is x0−x1, and the extension of the spring on the right is x2−x0:
Note that if the mass is displaced from x0 in any direction, the net force on the mass will be in the direction of the equilibrium position, and will act to “restore” the position of the mass back to x0.
When the mass is at some position x, as shown in the bottom panel (for the k1 spring in compression and the k2 spring in extension), Newton’s Second Law for the mass is:
Note that, mathematically, this equation is of the form −kx+C=ma, which is the same form of the equation that we had for the vertical spring-mass system (with C=mg), so we expect that this will also lead to simple harmonic motion. We can use the equilibrium condition (k1x1+k2x2=(k1+k2)x0) to re-write this equation:
Let us define k=k1+k2 as the “effective” spring constant from the two springs combined. We can also define a new coordinate, x′=x−x0, which simply corresponds to a new x axis whose origin is located at the equilibrium position (in a way that is exactly analogous to what we did in the vertical spring-mass system). We can thus write Newton’s Second Law as:
and we find that the motion of the mass attached to two springs is described by the same equation of motion for simple harmonic motion as that of a mass attached to a single spring. In this case, the mass will oscillate about the equilibrium position, x0, with a an effective spring constant k=k1+k2. Combining the two springs in this way is thus equivalent to having a single spring, but with spring constant k=k1+k2. The angular frequency of the oscillations is given by:
In the previous sections, we modelled the motion of a mass attached to a spring and found that its position, x(t), was described by the following differential equation:
We then saw that the motion of a vertical spring-mass system, as well as that of a mass attached to two springs, could also be described by (28). Any physical system that can described by (28) is said to undergo “simple harmonic motion”, or to be a “simple harmonic oscillator”. If we find that the physical model of a system leads to (28), then we immediately know that the position of system can be described by (29).
The key physical characteristic of a simple harmonic oscillator is that there is a “restoring force” whose magnitude is proportional to the displacement from the equilibrium position. A restoring force is a force that acts to place the system back in equilibrium, and is thus always in the direction that is opposite of the displacement relative to an equilibrium position. In the three systems that we considered so far, the net force on the mass was always such that it would restore the mass back to the equilibrium position, where the net force on the mass is zero.
Many systems in nature are well modelled as simple harmonic oscillators. Some examples are: the motion of a pendulum as it oscillates, the motion of a buoy bobbing up and down in the sea, the motion of electrons in a shorted capacitor, and the vibrations of atoms in a molecule.
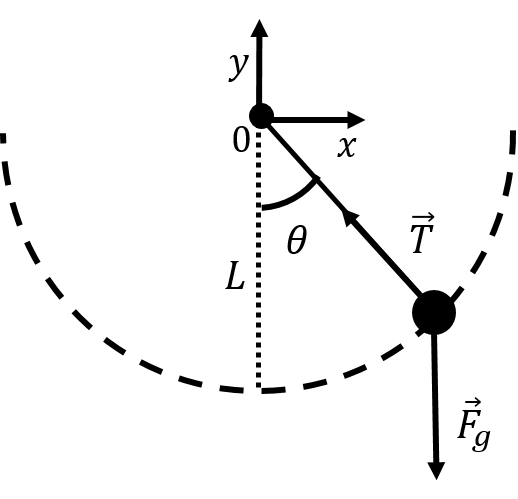
In this section, we show how and when the motion of a pendulum can be described as simple harmonic motion. Consider the simple pendulum that is constructed from a mass-less string of length, L, attached to a fixed point on one end and to a point mass m on the other, as illustrated in Figure 8.
Figure 8:A simple pendulum which oscillates in a vertical plane.
The pendulum can swing in the vertical plane, and we have shown our choice of coordinate system (the z axis, not shown, is out of the page). The only two forces on the mass are the tension from the string and its weight. We can describe the position of the mass by the angle, θ(t), that the string makes with the vertical. We can model the dynamics of the simple pendulum by considering the net torque and angular acceleration about the axis of rotation that is perpendicular to the plane of the page and that goes through the point on the string that is fixed.
The force of tension cannot create a torque on the mass about the axis of rotation, as it is anti-parallel to the vector from the point of rotation to the mass. The net torque is thus the torque from the force of gravity:
where L is the magnitude of the vector, r, from the axis of rotation to where the force of gravity is exerted. The net torque is equal to the angular acceleration, α, multiplied by the moment of inertia, I, of the mass:
where I=ML2 is the moment of inertia for a point mass a distance L away from the axis of rotation. For the position illustrated in Figure 8, the angular acceleration of the pendulum is in the negative z direction (into the page) and corresponds to a clockwise motion for the pendulum, as we would expect. The angular acceleration is the second time derivative of the angle, θ:
where we only used the magnitudes in the second equation, since all of the angular quantities are in the z direction. This equation of motion for θ(t) almost looks like the equation for simple harmonic oscillation for the angle θ (except that we have sinθ instead of θ). However, consider the “the small angle approximation”\footnote{Look up the Maclaurin/Taylor series for the sine function!} for the sine function:
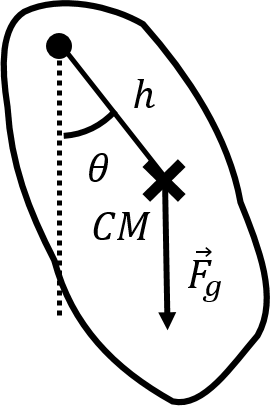
A physical pendulum is defined as any object that is allowed to rotate in the vertical plane about some axis that goes through the object, as illustrated in Figure 9.
Figure 9:A physical pendulum which oscillates in a vertical plane about an axis through the object.
The only forces exerted on the pendulum are its weight (exerted at its centre of mass) and a contact force exerted at the axis of rotation. The physical pendulum can be modelled in exactly the same way as the simple pendulum, except that we use the moment of inertia of the object about the axis of rotation. Only the weight results in a torque about the rotation axis, since the contact force is exerted at the rotation axis:
A simple harmonic oscillator will always oscillate about an equilibrium position, where the net force on the oscillator is zero. The net force on a simple harmonic oscillator is always directed towards the equilibrium position, and has a magnitude proportional to the distance of the oscillator from its equilibrium position. The force is called a restoring force. A vertical spring-mass system, and a mass attached to two springs will both undergo simple harmonic motion about their respective equilibrium position.
A simple pendulum will undergo simple harmonic oscillations, if the amplitude of the oscillations is small. The angular frequency for the oscillations of a simple pendulum only depends on the length of the pendulum:
A physical pendulum of mass m which oscillates about an axis through the object will also undergo simple harmonic oscillation in the small angle approximation. The angular frequency of the oscillations for a physical pendulum is given by:
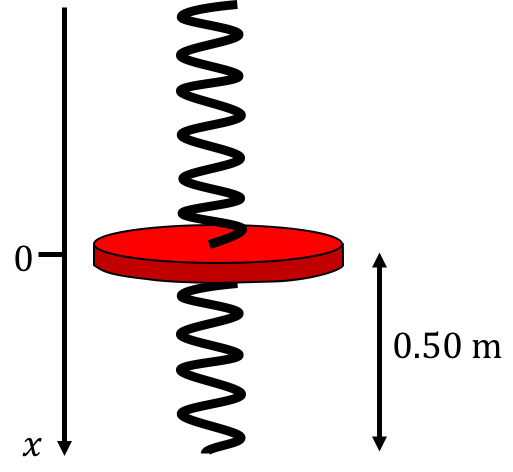
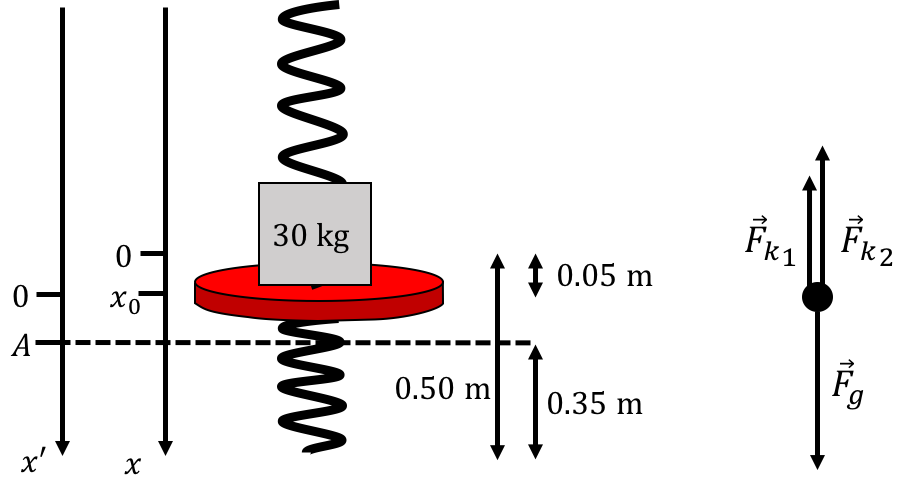
First, we need to solve for the new equilibrium position of the platform, x0, when Ty is standing on the platform. We define the x axis so that the origin is 50cm above the ground (the equilibrium position when no one is standing on the platform) and choose the positive direction to be downwards (Figure 13).
Figure 13:The platform when no one is standing on it.
Even though we do not know the mass of the platform, or the actual resting lengths of the spring, we do not need to know these, since we can model the platform with nobody on it as a single spring with spring constant k=k1+k2 and rest position x=0.
When Ty is standing on the platform, the sum of the forces is given by his weight and the force from the “effective spring”:
In order to show that this is simple harmonic motion, we need to combine the right hand side of the equation into one term. We found earlier that mg=(k1+k2)x0, which we can use here:
This equation tells us that this is simple harmonic motion about the new equilibrium position, where ω=(k1+k2)/m. We know that the lowest point that the platform reaches is 35cm above the ground, which, on our x′ axis, corresponds to x′=10cm (Figure 14). Thus, the amplitude of the oscillation is A=0.1m. Because this is simple harmonic motion, we know that the position of the platform can be described by the following function:
a. The only force that creates a torque on the masses is the restoring force from the twisting of the wire. The rotational dynamics version of Newton’s Second Law relates this torque to the angular acceleration, α of the rod:
The moment of inertia for one of the masses is m(L/2)2, where L/2 is the distance from the mass to the axis of rotation. The moment of inertia for the two masses attached to the mass-less rod is:
b. The two forces that provide torques for the small spheres are gravity and the force exerted by the twisting wire. Each of the small spheres will experience a force due to gravity from the nearest large sphere. At equilibrium, the force due to gravity on one of the small spheres is therefore:
Assuming that, at equilibrium, the force vector is perpendicular to the rod, the torque from one of the large spheres is just the force multiplied by the distance to the axis of rotation. Since there are two large spheres, each of which creates a torque on the pendulum, the total torque due to gravity is:
(Note that τg is the torque due to gravity at equilibrium only). We can use Newton’s second law for the pendulum to find an expression for G. At equilibrium, the net torque is equal to zero, and the angle of deflection is β:
(b) Applying x(0)=Acosϕ=0 gives ϕ=±π/2. To choose the sign, apply v(0)=−Aωsinϕ=v0>0, which requires sinϕ<0, so ϕ=−π/2. A negative phase shifts the cosine to the right, placing the mass at x=0 moving in the positive direction at t=0, consistent with the given initial conditions.
(b) As shown in the text, a vertical spring-mass system undergoes SHM about its equilibrium position with the same angular frequency as a horizontal system:
Since ω=g/L contains no mass, the period is independent of the bob’s mass.
(c) The speed is maximum at the equilibrium position (bottom of the swing). Using energy conservation with height h=L(1−cosθmax)=1.00(1−cos8.0°)=0.00970m:
The argument to the cosine function is in radians, since the angular frequency is usually defined in radians per second. The value of ϕ is constrained to be within that range, since the cosine function is periodic with a period 2π.