In this chapter, we introduce the concepts of linear momentum and of centre of mass. Momentum is a quantity that, like energy, can be defined from Newton’s Second Law, to facilitate building models. Since momentum is often a conserved quantity within a system, it can make calculations much easier than using forces. The concepts of momentum and of centre of mass will also allow us to apply Newton’s Second Law to systems comprised of multiple particles including solid objects.
Momentum is a quantity that describes an object’s motion. Imagine an object that has a mass of 1 kg and a velocity of 1 m/s. Now, imagine doubling the mass and keeping the velocity constant. How would you say the object’s motion has changed? It may help to think of the quantity of motion as “oomph”. Does a more massive object have more or less oomph than a less massive object when they both move at the same speed? What if the 1 kg object doubles its speed? Does it have more oomph?
In 1687, Sir Isaac Newton published his Philosophiae Naturalis Principia Mathematica, where, among other things, he detailed his three laws of motion. The first law is summarized as
An object will remain in its state of motion, be it at rest or moving with constant velocity, unless a net external force is exerted on the object.
In perhaps simpler terms, this says that an object’s oomph or momentum will remain a constant quantity if nothing pushes or pulls on it.
Since this is a vector equation, it corresponds to three equations, one for each component of the momentum vector, which are defined by the velocity in each of the three dimensions. It should be noted that the numerical value for the momentum of a particle is arbitrary, as it depends in which frame of reference the velocity of the particle is defined. For example, your velocity with respect to the surface of the Earth may be zero, and so your momentum relative to the surface of the Earth is zero. However, relative to the surface of the Sun, your velocity, and momentum, are not zero. As we will see, forces are related to a changes in momentum, just as they are related to a change in velocity (acceleration).
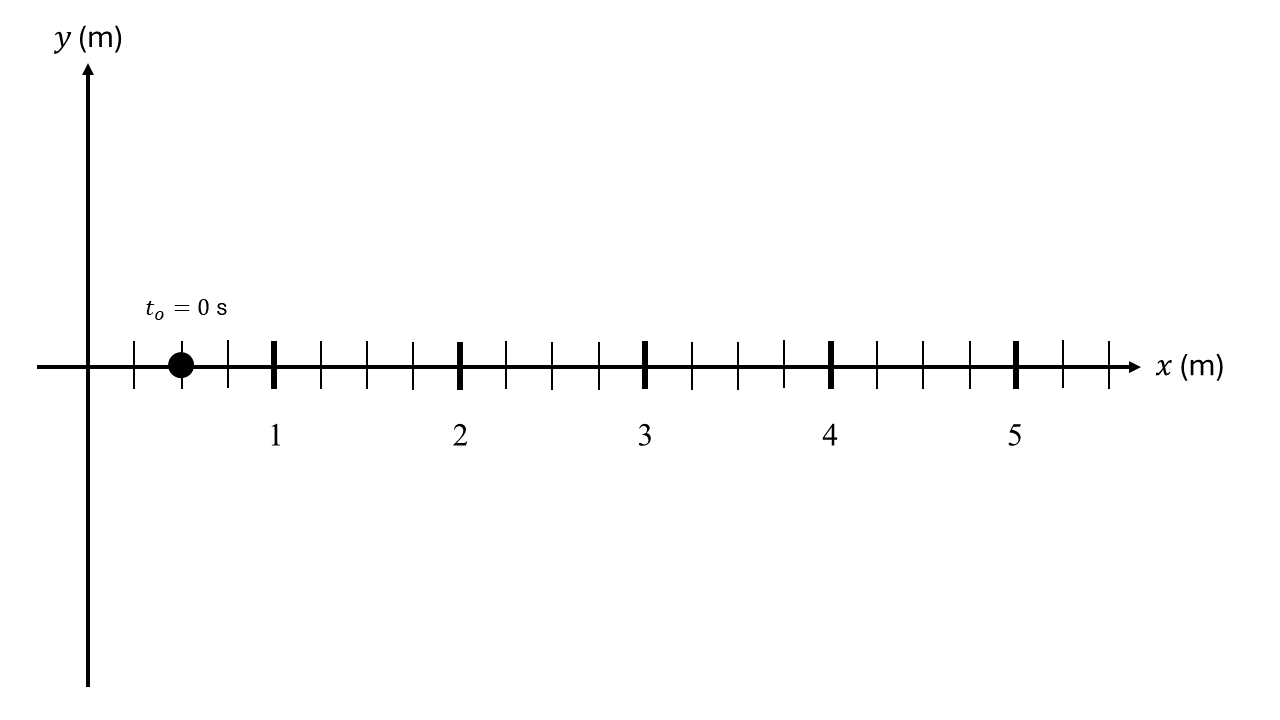
Consider a point particle[5] moving at constant velocity such as a rock sliding across a frozen pond. If we capture an image of the rock at the same time we start a stopwatch (to=0s), it might be located at a position 0.5 meters from the shore as shown in Figure 1. We will designate the direction the rock slides as being along the x-axis.
Figure 1:The initial position is 0.5 m of a rock sliding across a frozen pond.
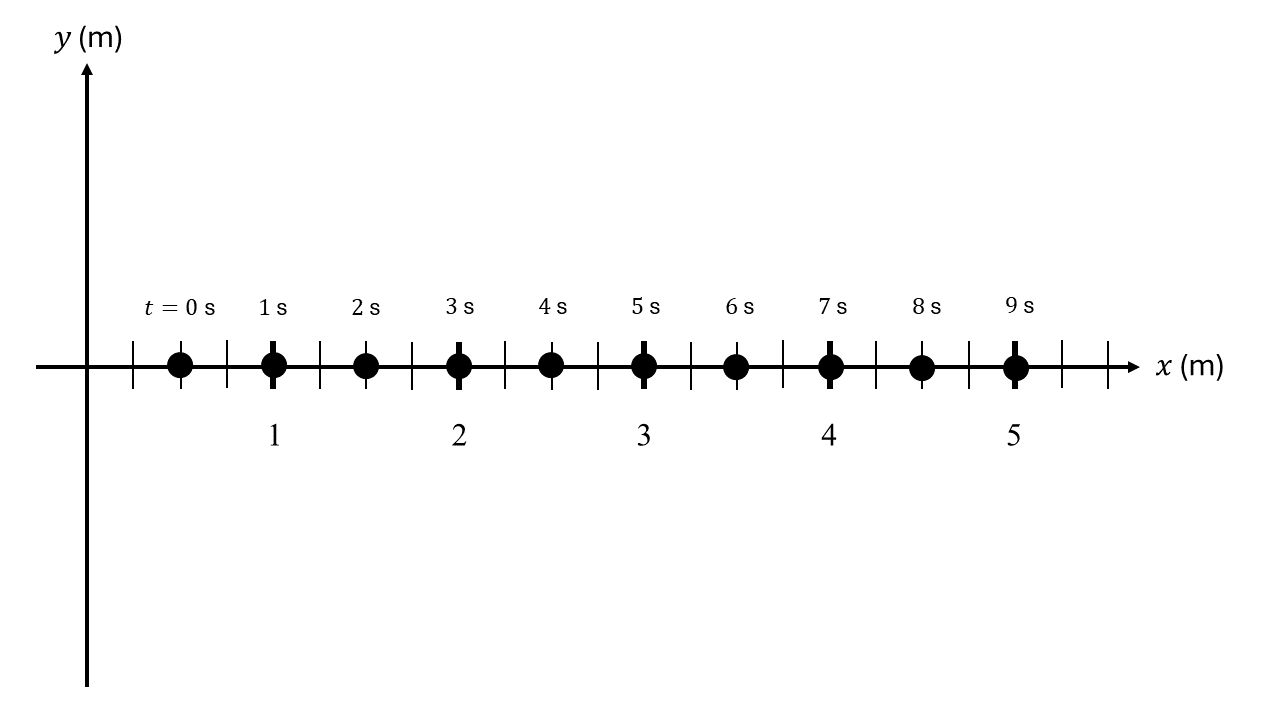
Figure 2:The motion diagram of a rock sliding across a frozen pond.
As time progresses, the rock will be at greater and greater distances from the shore. As shown in Figure 2, the rock slides 0.5 meters every second. Suppose we recorded its x-position every second in a table and obtained the values in Table 1 (we will ignore measurement uncertainties discussed in Section 2.4.1 and pretend that the values are exact).
Table 1:Time and x-position of a rock sliding across a frozen pond recorded every second.
Time t (s)
x-position (m)
0.0
0.5
1.0
1.0
2.0
1.5
3.0
2.0
4.0
2.5
5.0
3.0
6.0
3.5
7.0
4.0
8.0
4.5
9.0
5.0
The easiest way to visualize the values in the table is to plot them on a graph, as in Figure 3. Plotting position as a function of time is one of the most common graphs to make in physics, since it is often a complete description of the motion of an object.
Figure 3:Plot of position as a function of time using the values from Table 1.
The data plotted in Figure 3 show that the x position of the rock increases linearly with time (i.e. it is a straight line and the position increases at a constant rate). This means that in equal time increments, the rock will cover equal distances. Note that we also had the liberty to choose when we define t=0; in this case, we chose that time is zero when the rock is at x=0.5m.
Since the position as a function of time for the ball plotted in Figure 3 is linear, we can summarize our description of the motion using a function, x(t), instead of having to tabulate the values as we did in Table Table 1. The function will have the functional form:
The constant xo is the “offset” of the function; the value that the function has at t=0s. We call xo the “initial position” of the object (its position at t=0). The constant vx is the “slope” of the function and gives the rate of change of the position as a function of time. We call vx the “velocity” of the object.
The initial position is simply the value of the position at t=0, and is given from the table as:
The velocity, vx, is simply the difference in position, Δx=xf−xo, between any final, xf, and initial, xo, positions divided by the amount of time, Δt=tf−to, that it took the object to move between those two points (“rise over run” for the graph of x(t)):
where the arrow indicates the limit as the changes become very small. For the rock in one dimension as it moves from 0.5 m to 1.0 m over the duration of 1 second,
Therefore, the rock has a velocity of 0.5 m/s along the x-direction. We arbitrarily chose the change in position over the first second. However, with constant velocity, one could choose any time interval and the corresponding change in position to obtain the same constant velocity.
Rearranging the first line of equation (5) we see that the rock moves a small increment Δx each increment of time Δt
We often use t for Δt to indicate some total amount of time has passed since our initial position was recorded. As long as the velocity is constant, we can use equation (3) to determine the position of an object between any two points in time. In one dimension, the vector quantity of velocity indicates the speed of an object along a single coordinate direction. The vector can be positive (along the +x-direction) or negative (along the −x-direction).
Under constant velocity motion we can describe a future position of an object using the current position, the velocity, and an increment of time to progress into the future. With equation (3), we can model this motion on computer. We will use the Python language in this textbook, and in particular, we will use Visual Python so that we can apply physics to objects that visualize physical motion in 3D. To get started, we first need to define an object that will move through space and the pond surface. We will make a sphere call it rock. The rock object can beplaced at a position using a vector pos=vec(x,y,z). Similarly, we make the surface using a box object.
We can define the velocity to be a vector along the x-direction also using the built-in vector function velocity=vec(vx, vy, vz). To set the velocity to the appropriate vector, it would be coded
velocity = vec(0.5, 0, 0)
It is better practice to make the velocity one of the attributes of the rock object. We should be careful to only use this method when the attribute is a property of the object, e.g.,
rock.vel = vec(0.5, 0, 0)
We can visualize the velocity with a vector arrow that remains attached to the rock's position and has a length that is the magnitude of the velocity. To do this we write the following code.
``` python
arr = arrow(pos=rock.pos, axis=rock.vel, color=color.white)
Try, putting these three lines of code in the code below and see what happens when you run the program.
Figure 6:A blank Visual Python program to simulate a rock sliding on a frozen pond.
This code draws the rock and the velocity vector, but it does not simulate the motion. To simulate the motion, we need to update the position of the rock as time progresses. We can use a loop to repeat calculations of the position. For example, we can repeat the calculations while the time is less than 2 seconds. Each time the position is calculated, we will add a small increment of time for the next calculation. Here is an example where we start at time t=0 and increment the position every Δt=0.1s.
t = 0
delta_t = 0.1
while t<2:
rate(10)
rock.pos = rock.pos + rock.vel * delta_t #update the rock position
arr.pos = rock.pos #update the velocity arrow position
t = t + delta_t #increment the time
Try this code and see that the rock moves. A trail can be added to see where the rock was in the past. Add this line after the line of code where the rock is first defined.
where the arrow indicates the limit as the changes become very small. Just as we did with constant velocity and position, we can write kinematic equations of motion for velocity by applying the definition of acceleration.
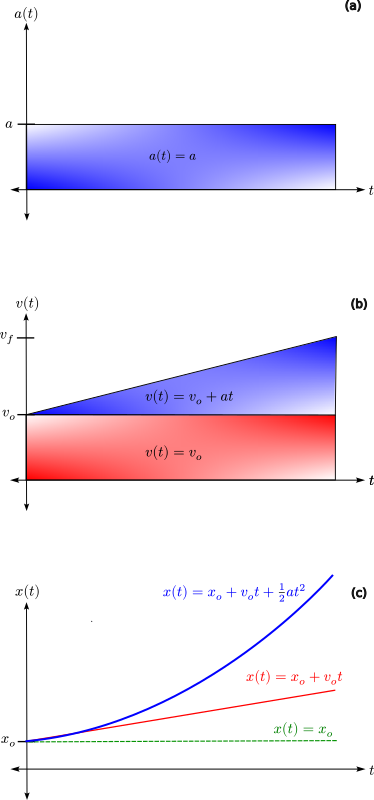
With constant acceleration, we can use graphical analysis to determine equations describing velocity and position as a function of time. In Figure 8 (a), a graph of constant acceleration is shown. Since acceleration is a change in velocity over time, we know that multiplying an acceleration by time gives a change in velocity. Notice that this change in velocity is the same as the area of the acceleration vs. time graph. The change in velocity is, of course, added to any pre-existing velocity an object has. This is depicted in Figure 8 (b) as a blue shaded triangle. Since a change in position comes from velocity and changes in velocity, we can apply the same analysis to the velocity vs. time graph to obtain an expression for position vs. time. For constant motion (no acceleration), the position changes as the red shaded area of Figure 8 (b), which has an area Δx=vot. This is shown in Figure 8 (c) as a red straight line. We would expect a linear form after seeing this for velocity with constant acceleration. To analyze motion with constant acceleration, we must add both the red rectangular and the blue triangular areas in Figure 8 (b). The rectangular area again has area vot. The triangular area is 1/2(vf−vo)t=1/2Δvt=1/2at2. Putting these together, one obtains the following set of kinematic equations.
We see that accelerated motion results in quadratic position vs. time.
Figure 8:Graphs depicting (a) constant acceleration, (b) constant and accelerated velocity, and (c) position that is constant, changing due to constant velocity, and changing due to constant acceleration.
If we assume the acceleration is constant with time, we can use integral calculus to determine equations describing position vs. time.
keeping in mind that these changes over time correspond to changes in the kinematic description of an object’s motion. This description of momentum changes leads us to the second of Newton’s Laws of Motion.
An object’s acceleration is proportional to the net force exerted on the object, inversely proportional to the mass of the object, and in the same direction as the net force exerted on the object.
We can write the change in momentum as Newton’s Second Law, since ma must be equal to the vector sum of the forces on the particle of mass m:
The equation above is the original form in which Newton first developed his theory. It says that the net force on an object is equal to the rate of change of its momentum. If the net force on the object is zero, then its momentum is constant (as is its velocity). In terms of components, Newton’s Second Law written for the rate of change of momentum is given by:
Forces are a concept central to physics and are related the concept of energy. We’ll see in Chapter 7 that we calculate the “work”, W, done by a force exerted on an object over a specific path between two points:
where the net force, Fnet, is the vector sum of the forces on the particle.
We can do the same thing, but instead of integrating the force over distance, we can integrate it over time. We thus introduce the concept of “impulse”, J, of a force, as that force integrated from an initial time, tA, to a final time, tB:
where it should be clear that impulse is a vector quantity (and the above vector equation thus corresponds to one integral per component). Impulse is, in general, defined as an integral because the force, F, could change with time. If the force is constant in time (magnitude and direction), then we can define the impulse without using an integral:
where Δt is the amount of time over which the force was exerted. Although the force might never be constant, we can sometimes use the above formula to calculate impulse using an average value of the force.
So far, we calculated the impulse that is given by a single force. We can also consider the net impulse given to an object by the net force exerted on the object:
This is similar to the statement that the net work done on an object corresponds to its change in kinetic energy, although one should keep in mind that momentum is a vector quantity, unlike kinetic energy.
4.3.2Systems of particles: internal and external forces¶
So far, we have only used Newton’s Second Law to describe the motion of a single point mass particle or to describe the motion of an object whose orientation we did not need to describe (e.g. a block sliding down a hill). In this section, we consider what happens when there are multiple point particles that form a “system”.
In physics, we loosely define a system as the ensemble of objects/particles that we wish to describe. So far, we have only described systems made of one particle, so describing the motion of the system was equivalent to describing the motion of that single particle. A system of two particles could be, for example, two billiard balls on a pool table. To describe that system, we would need to provide functions that describe the positions, velocities, and forces exerted on both balls. We can also define functions/quantities that describe the system as a whole, rather than the details. For example, we can define the total kinetic energy of the system, K, corresponding to the sum of kinetic energies of the two balls. We can also define the total momentum of the system, P, given by the vector sum of the momenta of the two balls.
When considering a system of multiple particles, we distinguish between internal and external forces. Internal forces are those forces that the particles in the system exert on each other. For example, if the two billiard balls in the system collide with each other, they will each exert a force on the other during the collision; those forces are internal. External forces are all other forces exerted on the particles of the system. For example, the force of gravity and the normal force from the pool table are both external forces exerted on the balls in the system (exerted by the Earth, or by the pool table, neither of which we considered to be part of the system). The force exerted by a person hitting one of the balls with a pool queue is similarly an external force. What we consider to be a system is arbitrary; we could consider the pool table and the Earth to be part of the system along with the two balls; in that case, the normal force and the weight of the balls would become internal forces. The classification of whether a force is internal or external to a system of course depends on what is considered part of the system.
The key property of internal forces is that the vector sum of the internal forces in a system is zero. This brings us to Newton’s Third Law of Motion. Newton’s Third Law states that for every force exerted by object A on object B, there is a force that is equal in magnitude and opposite in direction exerted by object B on object A. If we consider both objects to be in the same system, then the sum of the internal forces between objects A and B must sum to zero. It is important to note that this is quite different than what we have discussed so far about summing forces. The forces that sum to zero are exerted on different objects. Thus far, we had only ever considered summing forces that are exerted on the same object in order to apply Newton’s Second Law. We have never encountered a situation where “action” and “reaction” forces are summed together, because they act on different objects.
The quantity on the right is the sum of the forces exerted on particle 1 plus the sum of the forces exerted on particle 2. In other words, it is the sum of all of the forces exerted on all of the particles in the system, which we can write as a single sum. On the left hand side, we have the sum of the two time derivatives of the momenta, which is equal to the time-derivative of the sum of the momenta. We can thus re-write the equation as:
where, again, the sum on the right is the sum over all of the forces exerted on the system. Some of those forces are external (e.g. gravity exerted by Earth on the particles), whereas some of the forces are internal (e.g. a contact force between the two particles). We can separate the sum into a sum over all external forces (Fext) and a sum over internal forces (Fint):
because for every force that particle 1 exerts on particle 2, there will be an equal and opposite force exerted by particle 2 on particle 1. We thus have:
which is the equivalent of Newton’s Second Law for a system where, P, is the total momentum of the system, and the sum of the forces is only over external forces to the system.
Note that the derivation above easily extends to any number, N, of particles, even though we only did it with N=2. In general, for the “ith particle”, with momentum pi, we can write Newton’s Second Law:
where the sum of the forces is the sum over all forces external to the system. Thus, if there are no external forces on a system, then the total momentum of that system is conserved (if the time-derivative of a quantity is zero then that quantity is constant).
We already argued in the previous section that we can make all forces internal if we choose our system to be large enough. If we make the system be the Universe, then there are no forces external to the Universe, and the total momentum of the Universe must be constant:
If no forces are exerted on a single particle, then the momentum of that particle is constant (conserved).
In a system of particles, the total momentum of the system is conserved if there are no external forces on the system.
If there are no non-conservative forces exerted on a particle, then that particle’s mechanical energy is constant (conserved).
In a system of multiple particles, the total mechanical energy of the system will be conserved if there are no non-conservative forces exerted on the system.
When we refer to a force being “exerted on a system”, we mean exerted on one or more of the particles in the system. In particular, the sum of the work done by internal forces is not necessarily zero, so energy and momentum are thus conserved under different conditions.
In this section we go through a few examples of applying conservation of momentum to model collisions. Collisions can loosely be defined as events where the momenta of individual particles in a system are different before and after the event.
We distinguish between two types of collisions: elastic and inelastic collisions. Elastic collisions are those for which the total mechanical energy of the system is conserved during the collision (i.e. it is the same before and after the collision). Inelastic collisions are those for which the total mechanical energy of the system is not conserved. In either case, to model the system, one chooses to define the system such that there are no external forces on the system so that total momentum is conserved.
In this section, we give a few examples of modelling inelastic collisions. Inelastic collisions are usually easier to handle mathematically, because one only needs to consider conservation of momentum and does not use conservation of energy (which usually involves equations that are quadratic in the speeds because of the kinetic energy term).
In this section, we give a few examples of modelling elastic collisions. Even though it is mechanical energy that is conserved in an elastic collision, one can almost always simplify this to only kinetic energy being conserved. If a collision takes place in a well localized position in space (i.e. before and after the collision are the same point in space), then the potential energies of the objects involved will not change, thus any change in their mechanical energy is due to a change in kinetic energy.
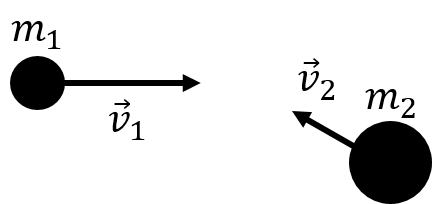
Because the momentum of a particle is defined using the velocity of the particle, its value depends on the reference frame in which we chose to measure that velocity. In some cases, it is useful to apply momentum conservation in a frame of reference where the total momentum of the system is zero. For example, consider two particles of mass m1 and m2, moving towards each other with velocities v1 and v2, respectively, as measured in a frame of reference S, as illustrated in Figure 17.
Figure 17:Two particles moving towards each other.
In the frame of reference S, the total momentum, P, of the two particles can be written:
Consider a frame of reference, S′, that is moving with velocity, vCM, relative to the frame of reference S. In that frame of reference, the velocities of the two particles are different and given by:
This “special” frame of reference, in which the total momentum of the system is zero, is called the “centre of mass frame of reference”. The velocity of centre of mass frame of reference can easily be obtained if there are N particles involved instead of two:
Again, you should note that because the above equation is a vector equation, it represents one equation per component of the vectors. For example, the x component of the velocity of the centre of mass frame of reference is given by:
Use the PhET simulation to verify Example 4.11 illustrated in Figure 15. Does the perpendicular relationship for final momenta always result? What vector algebra can you employ to calculate this relationship? Determine a set of rules for these two dimensional collisions. For example, are the final momenta perpendicular
if the velocity of the first proton changes?
if the second proton has a velocity (be careful, the protons must collide.)?
if the first proton collides with the second proton more directly?
if the collision is two different masses rather than two protons?
In this section, we show how to generalize Newton’s Second Law so that it may describe the motion of an object that is not a point particle. Any object can be described as being made up of point particles; for example, those particles could be the atoms that make up regular matter. We can thus use the same terminology as in the previous sections to describe a complicated object as a “system” comprised of many point particles, themselves described by Newton’s Second Law. A system could be a rigid object where the point particles cannot move relative to each other, such as atoms in a solid[7]. Or, the system could be a gas, made of many atoms moving around, or it could be a combination of many solid objects moving around.
In the previous section, we saw how the total momentum and the total mechanical energy of the system could be used to describe the system as a whole. In this section, we will define the centre of mass which will allow us to describe the position of the system as a whole.
Consider a system comprised of N point particles. Each point particle i, of mass mi, can be described by a position vector, ri, a velocity vector, vi, and an acceleration vector, ai, relative to some coordinate system in an inertial frame of reference. Newton’s Second Law can be applied to any one of the particles in the system:
where Fik is the k-th force exerted on particle i. We can write Newton’s Second Law once for each of the N particles, and we can sum those N equations together:
where the sum on the left is the sum of all of the forces exerted on all of the particles in the system[8] and the sum over i on the right is over all of the N particles in the system. As we have already seen, the sum of all of the forces exerted on the system can be divided into separate sums over external and internal forces:
to describe the system as a whole. However, it is not (yet) clear what is accelerating with acceleration, aCM, since the particles in the system could all be moving in different directions. Suppose that there is a point in the system, whose position is given by the vector, rCM, in such a way that the acceleration above is the second time-derivative of that position vector:
where in the last line we set the quantities that have the same time derivative equal to each other[10]. rCM is the vector that describes the position of the “centre of mass” (CM). The position of the centre of mass is described by Newton’s Second Law applied to the system as a whole:
where M is the total mass of the system, and the sum of the forces is the sum over only external forces on the system.
Although we have formally derived Newton’s Second Law for a system of particles, we really have been using this result throughout the text. For example, when we modelled a block sliding down an incline, we never worried that the block was made of many atoms all interacting with each other and the surroundings. Instead, we only considered the external forces on the block, namely, the normal force from the incline, any frictional forces, and the total weight of the object (the force exerted by gravity). Technically, the force of gravity is not exerted on the block as a whole, but on each of the atoms. However, when we sum the force of gravity exerted on each atom:
we find that it can be modelled by considering the block as a single particle of mass M upon which gravity is exerted. The centre of mass is sometimes described as the “centre of gravity”, because it corresponds to the location where we can model the total force of gravity, Mg, as being exerted. When we applied Newton’s Second Law to the block, we then described the motion of the block as a whole (and not the motion of the individual atoms). Specifically, we modelled the motion of the centre of mass of the block.
The position of the centre of mass is a vector equation that is true for each coordinate:
The centre of mass is that position in a system that is described by Newton’s Second Law when it is applied to the system as a whole. The centre of mass can be thought of as an average position for the system (it is the average of the positions of the particles in the system, weighted by their mass). By describing the position of the centre of mass, we are not worried about the detailed positions of the all of the particles in the system, but rather only the average position of the system as a whole. In other words, this is equivalent to viewing the whole system as a single particle of mass M located at the position of the centre of mass.
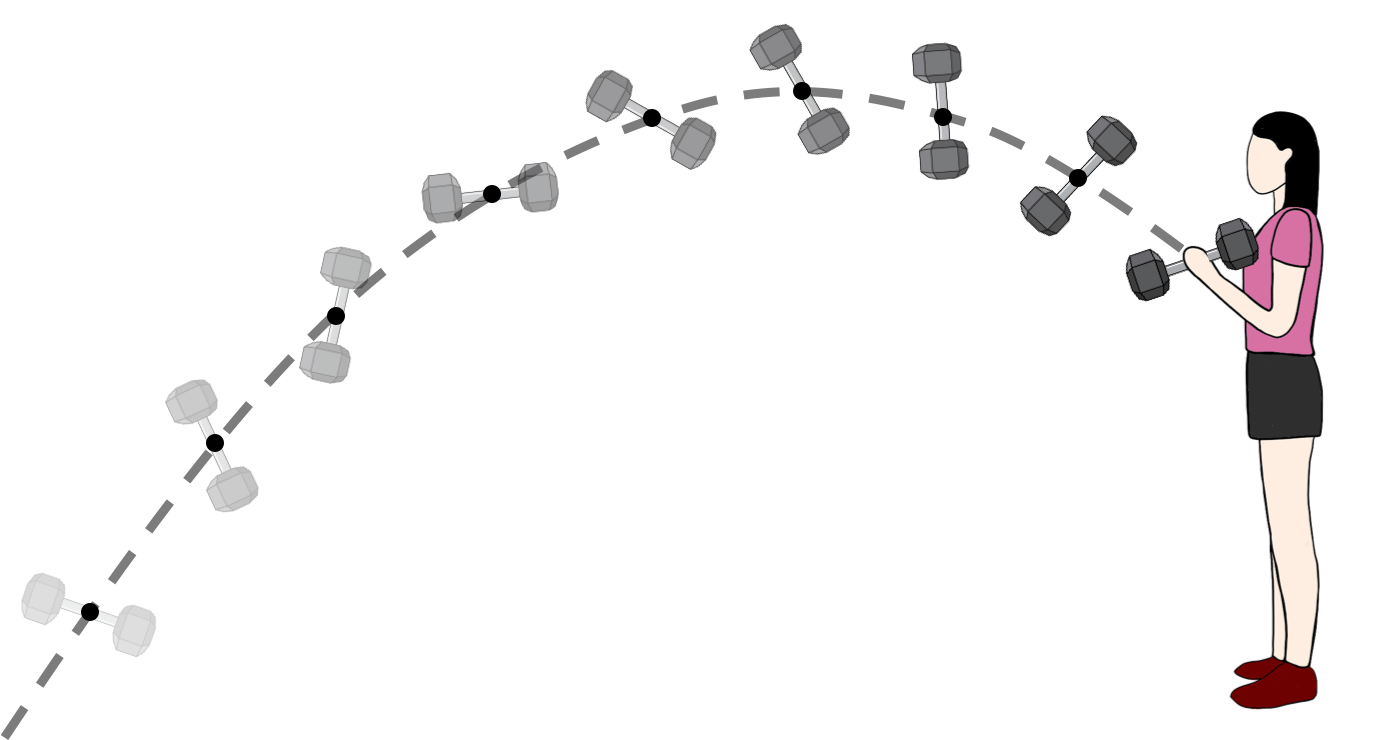
Consider, for example, a person throwing a dumbbell that is made from two spherical masses connected by a rod, as illustrated in Figure 21. The dumbbell will rotate in a complex manner as it moves through the air. However, the centre of mass of the dumbbell will travel along a parabolic trajectory (projectile motion), because the only external force exerted on the dumbbell during its trajectory is gravity.
Figure 21:The motion of the centre of mass of a dumbbell is described by Newton’s Second Law, even if the motion of the rotating dumbbell is more complex.
If we take the derivative with respect to time of the centre of mass position, we obtain the velocity of the centre of mass, and its components, which allow us to describe how the system is moving as a whole:
Note that this is the same velocity that we found earlier for the velocity of the centre of mass frame of reference. In the centre of mass frame of reference, the total momentum of the system is zero. This makes sense, because the centre of mass represents the average position of the system; if we move “with the system”, then the system appears to have zero momentum.
We can also define the total momentum of the system, P, in terms of the total mass, M, of the system and the velocity of the centre of mass:
and again, we see that the total momentum of the system is conserved if the net external force on the system is zero. In other words, the centre of mass of the system will move with constant velocity when momentum is conserved.
Finally, we can also define the acceleration of the centre of mass by taking the time derivative of the velocity:
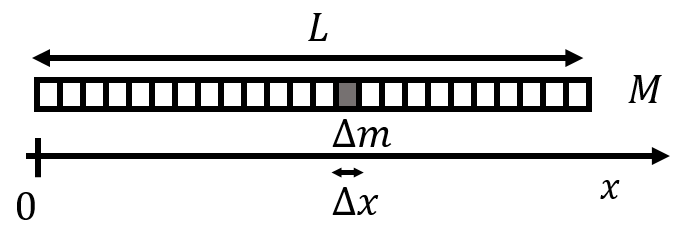
So far, we have considered the centre of mass for a system made of point particles. In this section, we show how one can determine the centre of mass for a “continuous object”[11]. We previously argued that if an object is uniform and symmetric, its centre of mass will be located at the centre of the object. Let us show this explicitly for a uniform rod of total mass M and length L, as depicted in Figure 24.
In order to determine the centre of mass of the rod, we first model the rod as being made of N small “mass elements” each of equal mass, Δm, and of length Δx, as shown in Figure 24. If we choose those mass elements to be small enough, we can model them as point particles, and use the same formulas as above to determine the centre of mass of the rod.
We define the x axis to be co-linear with the rod, such that the origin is located at one end of the rod. We can define the “linear mass density” of the rod, λ, as the mass per unit length of the rod:
where xi is the x coordinate of the i-th mass element. Of course, we can take the limit over which the length, Δx, of each mass element goes to zero to obtain an integral:
where the discrete variable xi became the continuous variable x, and Δx was replaced by dx (which is the same, but indicates that we are taking the limit of Δx→0). The integral is easily found:
where we substituted the definition of λ back in to find, as expected, that the centre of mass of the rod is half its length away from one of the ends.
Suppose that the rod was instead not uniform and that its linear density depended on the position x along the rod:
We can still find the centre of mass by considering an infinitesimally small mass element of mass dm, and length dx. In terms of the linear mass density and length of the mass element, dx, the mass dm is given by:
where in general, one will need to write dm in terms of something that depends on position (or a constant) so that the integrals can be evaluated over the spatial coordinates (x,y,z) over the range that describe the object. In the above, we wrote dm=λdx to express the mass element in terms of spatial coordinates.
We often consider the motion of an object around a circle of fixed radius, R. In principle, this is motion in two dimensions, as a circle is necessarily in a two dimensional plane. However, since the object is constrained to move along the circumference of the circle, it can be thought of (and treated as) motion along a one dimensional axis that is curved.
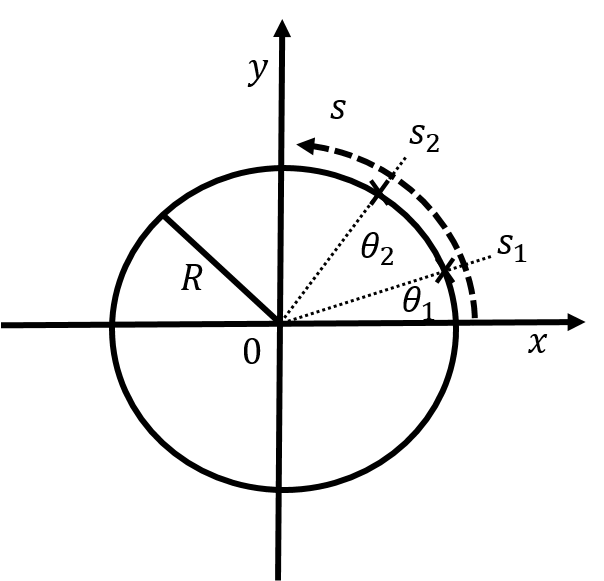
Figure 27:Describing the motion of an object around a circle of radius R.
Figure 27 shows how we can describe motion along a circle of radius, R. We could use x(t) and y(t) to describe the position on the circle, however, x(t) and y(t) are no longer independent since they have to correspond to the coordinates of points on a circle:
Instead of using x and y, we could think of an axis that is bent around the circle (as shown by the curved arrow in Figure 27, the s axis). The s axis is such that s=0 where the circle intersects the x axis, and the value of s increases as we move counter-clockwise along the circle. Distance along the s axis thus corresponds to the distance along the circumference of the circle.
Another variable that could be used for position instead of s is the angle, θ, between the position vector of the object and the x axis, as illustrated in Figure 27. If we express the angle θ in radians, then it is easy to convert between s and θ. Recall, an angle in radians is defined as the length of an arc subtended by that angle divided by the radius of the circle. We thus have:
In particular, if the object has gone around the whole circle, then s=2πR (the circumference of a circle), and the corresponding angle is, θ=R2πR=2π, namely 360∘.
By using the angle, θ, instead of x and y, we are effectively using polar coordinates, with a fixed radius. As we already saw, the x and y positions are related to θ by:
where we used the Chain Rule to calculate the time derivatives of the trigonometric functions (since θ(t) is function of time). We can write this in component form:
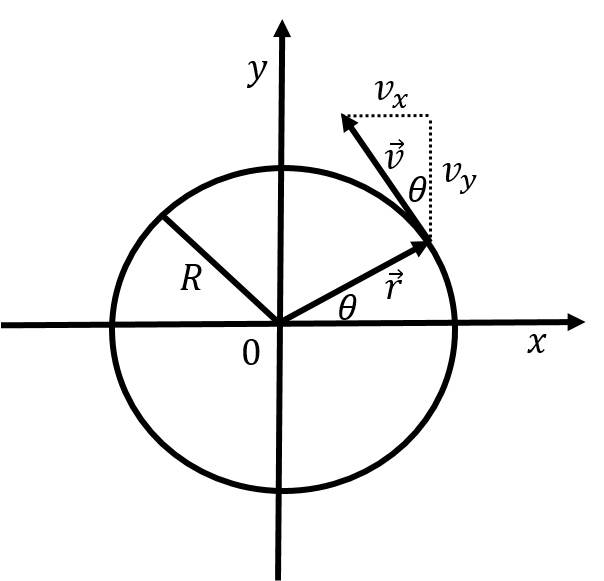
The position and velocity vectors are illustrated in Figure 28 for an angle θ in the first quadrant (0<θ<2π).
Figure 28:The position vector, r(t) is always perpendicular to the velocity vector, v(t), for motion on a circle.
In this case, you can note that the x component of the velocity is negative (from the diagram and from the velocity equations above). You can also see that ∣vy∣∣vx∣=tan(θ), which is illustrated in Figure 28, showing that the velocity vector is tangent to the circle and perpendicular to the position vector. This is always the case for motion along a circle.
We can simplify our description of motion along the circle by using either s(t) or θ(t) instead of the vectors for position and velocity. If we use s(t) to represent position along the circumference (s=0 where the circle intersects the x axis), then the velocity along the s axis is:
where we used the fact that θ=s/R to convert from s to θ. The velocity along the s axis is thus precisely equal to the magnitude of the two-dimensional velocity vector (derived above), which makes sense since the velocity vector is tangent to the circle (and thus in the s “direction”).
If the object has a constant speed, vs, along the circle and started at a position along the circumference s=s0, then its position along the s axis can be described using 1D kinematics:
where we introduced θ0 as the angle corresponding to the position s0, and we introduced ω=dtdθ, which is analogous to velocity, but for an angle. ω is called the angular velocity and is a measure of the rate of change of the angle θ (as it is the time derivative of the angle). The relation between the “linear” velocity vs (the magnitude of the velocity vector, which corresponds to the velocity in the direction tangent to the circle) and ω is:
If the object started at t=0 with a position s=s0 (θ=θ0), and an initial linear velocity v0s (angular velocity ω0), and has a constant linear acceleration around the circle, as (angular acceleration, α), then the position of the object can be described using either the linear or the angular quantities:
That is, the component of the acceleration vector that is parallel to the velocity is precisely the acceleration in the s direction (the linear acceleration). This component of the acceleration is responsible for increasing (or decreasing) the speed of the object and is zero if the object goes around the circle with a constant speed (linear or angular).
As we saw earlier, the perpendicular component of the acceleration, a⊥(t), is responsible for changing the direction of the velocity vector (as the object continuously changes direction when going in a circle). When the motion is around a circle, this component of the acceleration vector is called ``centripetal’’ acceleration (i.e. acceleration pointing towards the centre of the circle, as we will see). We can calculate the centripetal acceleration in terms of our angular variables, noting that the unit vector in the direction of the velocity is v^=−sin(θ)x^+cos(θ)y^:
where you can easily verify that the vector [−cos(θ)x^−sin(θ)y^] has unit length and points towards the centre of the circle (when the tail is placed on a point on the circle at angle θ). The centripetal acceleration thus points towards the centre of the circle and has magnitude:
where in the last equal sign, we wrote the centripetal acceleration in terms of the speed around the circle (v=∣∣v∣∣=vs).
If an object goes around a circle, it will always have a centripetal acceleration (since its velocity vector must change direction). In addition, if the object’s speed is changing, it will also have a linear acceleration, which points in the same direction as the velocity vector (it changes the velocity vector’s length but not its direction).
When an object is moving around in a circle, it will typically complete more than one revolution. If the object is going around the circle with a constant speed, we call the motion “uniform circular motion”, and we can define the period and frequency of the motion.
The period, T, is defined to be the time that it takes to complete one revolution around the circle. If the object has constant angular speed ω, we can find the time, T, that it takes to complete one full revolution, from θ=0 to θ=2π:
and has SI units of Hz=s−1. Think of frequency as the number of revolutions completed per second. Thus, if the frequency is f=1Hz, the object goes around the circle once per second. Given the frequency, we can of course obtain the angular velocity:
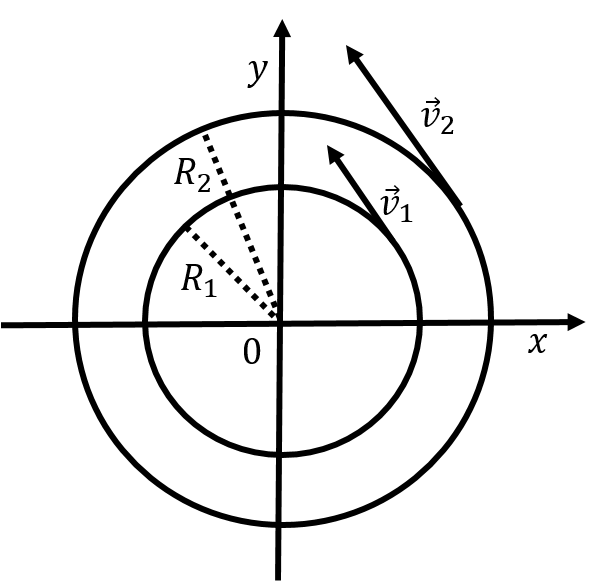
which is sometimes called the “angular frequency” instead of the angular velocity. The angular velocity can really be thought of as a frequency, as it represents the ``amount of angle’’ per second that an object covers when going around a circle. The angular velocity does not tell us anything about the actual speed of the object, which depends on the radius v=ωR. This is illustrated in Figure 29, where two objects can be travelling around two circles of radius R1 and R2 with the same angular velocity ω. If they have the same angular velocity, then it will take them the same amount of time to complete a revolution. However, the outer object has to cover a much larger distance (the circumference is larger), and thus has to move with a larger linear speed.
Figure 29:For a given angular velocity, the linear velocity will be larger on a larger circle (v=ωR).
where the net force on the particle determines the rate of change of its momentum. In particular, if there is no net force on a particle, its momentum will not change.
The net impulse vector, Jnet, is defined as the net force exerted on a particle integrated from a time tA to a time tB:
When we define a system of particles, we can distinguish between internal and external forces. Internal forces are those forces exerted by the particles in the system on each other. External forces are those forces on the particles in the system that are not exerted by the particles on each other. The sum over all of the forces on all of the particles in the system will be equal to the sum over the external forces, because the sum over all internal forces on a system is always zero (Newton’s Third Law).
The total momentum of a system, P, is the sum of the momenta, pi, of all of the particles in the system:
which can be thought of as an equivalent description as Newton’s Second Law, but for the system as a whole. If the net (external) force on a system is zero, then the total momentum of the system is conserved.
Collisions are those events when the particles in a system interact (e.g. by colliding) and change their momenta. When modelling collisions, it is usually beneficial to first define a system for which the total momentum is conserved before and after the collision.
Collisions can be elastic or inelastic. Elastic collisions are those where, in addition to the total momentum, the total mechanical energy of the system is conserved. The total mechanical energy can usually be taken as the sum of the kinetic energies of the particles in the system.
Inelastic collisions are those in which the total mechanical energy of the system is not conserved. One can usually identify if mechanical energy was introduced or removed from the system and determine if the collision is elastic. It is important to identify when momentum and mechanical energy are conserved. Momentum is conserved if no net force is exerted on the system, whereas mechanical energy is conserved if no net work was done on the system by non-conservative forces (internal or external) or by external conservative forces.
We can always choose in which frame of reference to model a collision. In some cases, it is convenient to use the frame of reference of the centre of mass of the system, because in that frame of reference, the total momentum of the system is zero.
If a system has a total mass M, then one can use Newton’s Second Law to describe its motion:
where the sum of the forces is over all of the external forces on the system. The acceleration vector, aCM, describes the motion of the “centre of mass” of the system. P=MvCM is the total momentum of the system.
The centre of mass of a system is a mass-weighted average of the positions of all of the particles of mass mi and position ri that comprise the system:
The vector equation can be broken into components to find the x, y, and z component of the position of the centre of mass. Similarly, one can also define the velocity of the centre of mass of the system, in terms of the individual velocities, vi, of the particles in the system:
Finally, one can define the acceleration of the centre of mass of the system, in terms of the individual accelerations, ai, of the particles in the system:
If the system is a continuous object, we can find its centre of mass using a sum (integral) of infinitesimally small mass elements, dm, weighted by their position:
The strategy to set up the integrals above is usually to express the mass element, dm, in terms of the position and density of the material of which the object is made. One can then integrate over position in the range defined by the dimensions of the object.
We can model this situation by dividing it into three phases:
Before the bullet collides with the pendulum, only the bullet has momentum in the x direction.
Immediately after the inelastic collision, the bullet and pendulum form a combined object of mass M+m that has the same momentum as the bullet, in the x direction, before the pendulum starts to swing upwards.
The pendulum with the embedded bullet swings upwards until its kinetic energy is zero.
The collision between the bullet and pendulum is inelastic, because some of the kinetic energy of the bullet is used to deform the bullet and the pendulum. In general, any collision where two objects end up “stuck together” is inelastic.
In order to model the pendulum’s motion we first apply conservation of momentum to determine the speed, v′, of the pendulum and embedded bullet just after the collision. Applying conservation of momentum in the x direction to the system formed by the pendulum and the bullet, just before and after the collision, we have:
where P and P′ are the initial and final momenta of the system, respectively. The pendulum with the bullet embedded in it will thus have a speed of v′ at the bottom of the pendulum’s motion, before it swings upwards.
We can now use conservation of energy to model the swinging motion since, at that point, only tension and gravity act on the pendulum, and there are no non-conservative forces. If we choose the origin to be the location of the pendulum at the bottom of its trajectory, its initial gravitational potential energy is zero and its initial mechanical energy, E, is given by:
At the top of the trajectory, the pendulum with the embedded bullet will stop and have no kinetic energy. The mechanical energy at the top of the trajectory, E′, is thus equal to the gravitational potential energy of the pendulum at a height h above the origin:
where is the second last line we used the expression for v′ that we obtained from conservation of momentum.
**Discussion: **This example showed a situation in which momentum and energy were both conserved, but not at the same time. This example also highlighted how, by using conservation laws, one can derive models that are much easier to solve mathematically than if one had to model all of the forces involved.
Solution 4.2
The collision is elastic because the energy used to compress the spring is “given back” when the spring extends again, since the spring force is conservative.
They key to modelling the compression of the spring is to identify the condition under which the spring is maximally compressed. This will occur at the point during the collision where the two masses will have exactly the same velocity, momentarily moving in unison as the spring is maximally compressed. Because, instantaneously, the masses have the same velocity, there is a frame of reference in which the two masses are at rest, and the momentum is zero. Of course, that frame of reference is the centre of mass frame of reference.
Because the collision is one-dimensional, we can calculate the velocity of the centre of mass as:
where we note that vm is a negative number, since the block of mass m is moving in the negative x direction. The total momentum, PCM, in the centre of mass frame of reference must be zero. Writing this out for the x component and transforming the velocities of the two blocks into the centre of mass frame of reference:
We can then use conservation of energy in the centre of mass frame to determine the maximal compression of the spring. Before the collision, the total mechanical energy in the system, E, is the sum of the kinetic energies of the two blocks (as the spring is not compressed):
where we used our expressions above to simplify the expression. When the spring is maximally compressed, the two blocks are at rest and the mechanical energy of the system, E′, is all “stored” as spring potential energy:
Discussion: By modelling the collision in the centre of mass frame of reference, we were easily able to determine the maximal compression of the spring. This would have been more difficult in the lab frame of reference, because the two blocks would still be moving when the spring is maximally compressed, so we would have needed to determine their speeds to determine the total mechanical energy when the spring is compressed.
When we calculated the initial kinetic energy, we found that it was given by:
The combination of masses in parentheses is called the “reduced mass” of the system, and is a sort of effective mass that can be used to model the system as a whole.
Solution 4.3
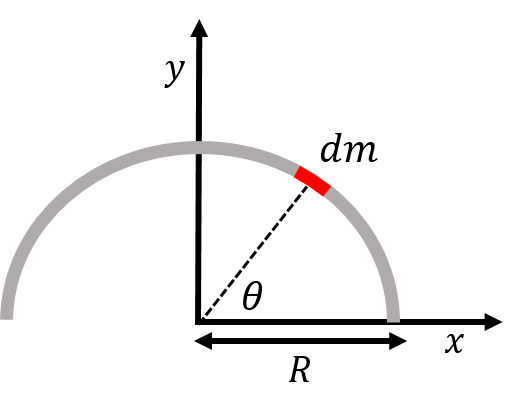
The curved wire is illustrated in Figure 33, along with a small mass element, dm, on the wire, and our choice of coordinate system (centred at the centre of the semi-circle). By symmetry, the position of the centre of mass will be located at x=0, so we only need to determine the y position.
Figure 33:A uniform wire bent into a semi circle of radius R, and a small mass element, dm, on the wire.
We will choose to integrate the equation for the y position of the centre of mass over θ (from 0 to π), instead of over y, as it will make the integral easier (it is easier to express dm in terms of dθ than dy because the wire is curved). θ is the angle at which the mass element is located. The mass element forms an arc on the wire of length ds that subtends an angle dθ. The two are related by:
A point particle is a convenient way to think about an object existing at a single point in space and ignoring complicating details about structure that do not affect the resulting physics.
Recall, the internal forces are those forces that particles in the system are exerting on one another. Because of Newton’s Third Law, these will sum to zero.
.](/PhysicsArtOfModeling/build/1dxvst-0f99760beea40775fb343590f9b6c0be.png)