In this chapter, we continue to develop the concept of energy in order to introduce a different formulation for Classical Physics that does not use forces. Although we can describe many phenomena using energy instead of forces, this method is completely equivalent to using Newton’s Three Laws. As such, this method can be derived from Newton’s formulation, as we will see. Because energy is a scalar quantity, for many problems, it leads to models that are much easier to develop mathematically than if one had used forces. The chapter will conclude with a presentation of the more modern approach, using “Lagrangian Mechanics”, that is currently preferred in physics and forms the basis for extending our description of physics to the microscopic world (e.g. quantum mechanics).
In Chapter 7.1, we introduced the concept of work, W, done by a force, F(r), acting on an object as it moves along a path from position A to position B:
where F(r) is a force vector that, in general, is different at different positions in space (r). We can also say that F depends on position by writing F(r)=F(x,y,z), since the position vector, r, is simply the vector r=xx^+yy^+zz^. That is, F(r) is just a short hand notation for F(x,y,z), and dl is a (very) small segment along the particular path over which one calculates the work.
The above integral is, in general, difficult to evaluate, as it depends on the specific path over which the object moved. In Example 7.2 of Chapter 7.1, we calculated the work done by friction on a crate that was slid across the floor along two different paths and indeed found that the work depended on the path that was taken. In Example 7.3 of the same chapter, we saw that the work done by the force of gravity when moving a box along two different paths did not depend on the path chosen[15].
We call “conservative forces” those forces for which the work done only depends on the initial and final positions and not on the path taken between those two positions. “Non-conservative” forces are those for which the work done does depend on the path taken. The force of gravity is an example of a conservative force, whereas friction is an example of a non-conservative force.
This means that the work done by a conservative force on a “closed path” is zero; that is, the work done by a conservative force on an object is zero if the object moves along a path that brings it back to its starting position.
Indeed, since the work done by a conservative force only depends on the location of the initial and final positions, and not the path taken between them, the work has to be zero if the object ends in the same place as where it started (a possible path is for the object to not move at all).
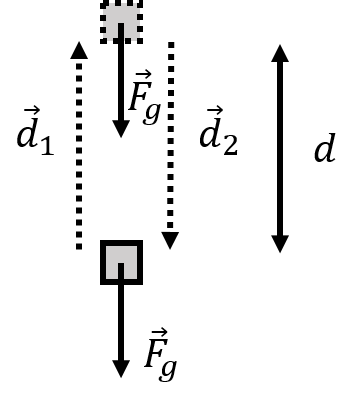
Consider the work done by gravity in raising (displacement d1) and lowering (displacement d2=−d1) an object back to its starting position along a vertical path, as depicted in Figure 2.
Figure 2:An object that has moved up and back down.
The total work done by gravity on this particular closed path is easily shown to be zero, as the work can be broken up into the negative work done as the object moves up (displacement vector d1) and the positive work done as the object moves down (displacement vector d2):
In order to write the path integral of the force over a closed path, we introduce a new notation to indicate that the starting and ending position are the same:
where the integral on the right is called a “surface integral” over the surface, S, enclosed by the closed path over which the work is being calculated. Don’t worry, it is way beyond the scope of this text to understand this integral or Stokes’ Theorem in detail! It is however useful in that it gives us the following conditions on the components of a force for that force to be conservative (by requiring the terms in parentheses to be zero):
In this section, we introduce the concept of “potential energy”. Potential energy is a scalar function of position that can be defined for any conservative force in a way to make it easy to calculate the work done by that force over any path. Since the work done by a conservative force in going from position A to position B does not depend on the particular path taken, but only on the end points, we can write the work done by a conservative force in terms of a “potential energy function”, U(r), that can be evaluated at the end points:
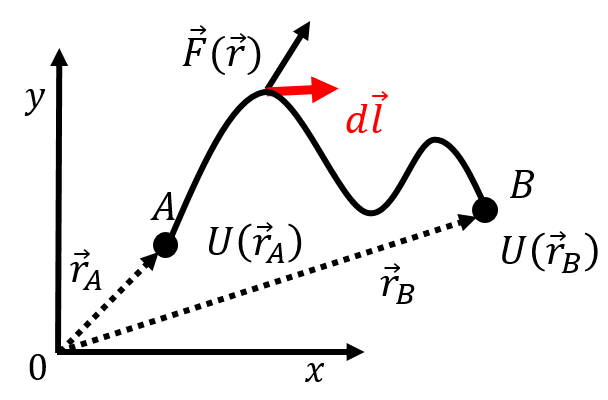
where we have have chosen to define the function U(r) so that it relates to the negative of the work done for reasons that will be apparent in the next section. Figure 4 shows an example of an arbitrary path between two points A and B in two dimensions for which one could calculate the work done by a conservative force using a potential energy function.
Figure 4:Illustration of calculating the work done by a conservative function along an arbitrary path by taking the difference in potential energy evaluated at the two endpoints, −W=U(rB)−U(rA).
Once we know the function for the potential energy, U(r), we can calculate the work done by the associated force along any path. In order to determine the function, U(r), we can calculate the work that is done along a path over which the integral for work is easy (usually, a straight line).
For example, near the surface of the Earth, the force of gravity on an object of mass, m, is given by:
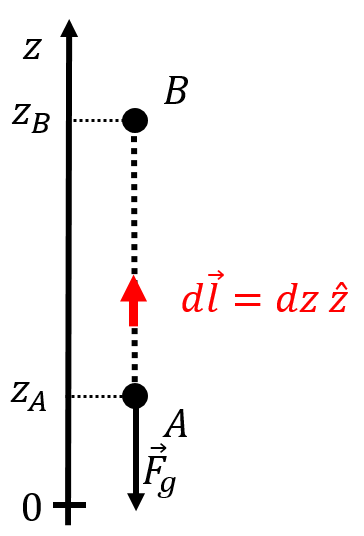
where we have defined the z axis to be vertical and positive upwards. We already showed in Example 8.1 that this force is conservative and that we can thus define a potential energy function. To do so, we can calculate the work done by the force of gravity over a straight vertical path, from position A to position B, as shown in Figure 5.
Figure 5:A vertical path for calculating the work done by gravity.
The work done by gravity from position A to position B is:
and we have found that, for the force of gravity near the surface of the Earth, one can define a potential energy function (by inspection), U(z)=mgz+C.
It is important to note that, since it is only the difference in potential energy that matters when calculating the work done, the potential energy function can have an arbitrary constant, C, added to it. Thus, the value of the potential energy function is meaningless, and only differences in potential energy are meaningful and related to the work done on an object. In other words, it does not matter where the potential energy is equal to zero, and by choosing C, we can therefore choose a convenient location where the potential energy is zero.
Given a (scalar) potential energy function, U(r), it is possible to determine the (vector) force that is associated with it. Take, for example, the potential energy from a spring (Example 8.4):
As you recall from Example 8.4, to find this function (in one dimension), we took the x component of the spring force and (effectively) found the negative of its anti-derivative, which we defined as the potential energy function:
Thus, the force can be obtained from the negative of the potential energy function, by taking its derivative with respect to position.
In three dimensions, the situation is similar, although the potential energy function (and the components of the force vector) will generally depend on all three position coordinates, x, y, and z. In three dimensions, the the three components of the force vector are given by taking the gradient of the negative of the potential energy function[16]:
where KA is the object’s initial kinetic energy and KB is its final kinetic energy. Generally, the net work done is the sum of the work done by conservative forces, WC, and the work done by non-conservative forces, WNC:
The work done by conservative forces can be expressed in terms of changes in potential energy functions. For example, suppose that two conservative forces, F1 and F2, are exerted on the object. The work done by those two forces is given by:
where U1 and U2 are the changes in potential energy associated with forces F1 and F2, respectively. We can re-arrange the Work-Energy Theorem as follows[17]:
That is, the work done by non-conservative forces is equal to the sum of the changes in potential and kinetic energies. In general, we can use ΔU to represent the change in the total potential energy of the object. The total potential energy is the sum of the potential energies associated with each of the conservative forces acting on the object (ΔU=ΔU1+ΔU2 above). The above expression can thus be written in a more general form:
That is, the sum of the changes in potential and kinetic energies of the object is always zero. This means that if the potential energy of the object increases, then the kinetic energy of the object must decrease by the same amount.
We can introduce the “mechanical energy”, E, of an object as the sum of the potential and kinetic energies of the object:
If the object started at position A, with potential energy UA and kinetic energy KA, and ended up at position B with potential energy UB and kinetic energy KB, then we can write the mechanical energy at both positions and its change ΔE, as:
This is what we generally call the “conservation of mechanical energy”. If there are no non-conservative forces doing work on an object, its mechanical energy is conserved (i.e. constant).
The introduction of mechanical energy gives us a completely different way to think about mechanics. We can now think of an object as having “energy” (potential and/or kinetic), and we can think of forces as changing the energy of the object.
We can also think of the work done by non-conservative forces as a type of change in energy. For example, the work done by friction can be thought of as a change in thermal energy (feel the burn as you rub your hand vigorously on a table!). If we can model the work done by non-conservative forces as a type of “other” energy, −WNC=ΔEother, then we can state that:
which is what we usually refer to as “conservation of energy”. That is, the total energy in a system, including kinetic, potential and any other form (e.g. thermal, electrical, etc.) is constant unless some external agent is acting on the system.
We can always include that external agent in the system so that the total energy of the system is constant. The largest system that we can have is the Universe itself. Thus, the total energy in the Universe is constant and can only transform from one type into another, but no energy can ever be added or removed from the Universe.
which will be a constant if there are no non-conservative forces doing work on the object. This means that if the potential energy of the object increases, then its kinetic energy must decrease by the same amount, and vice-versa.
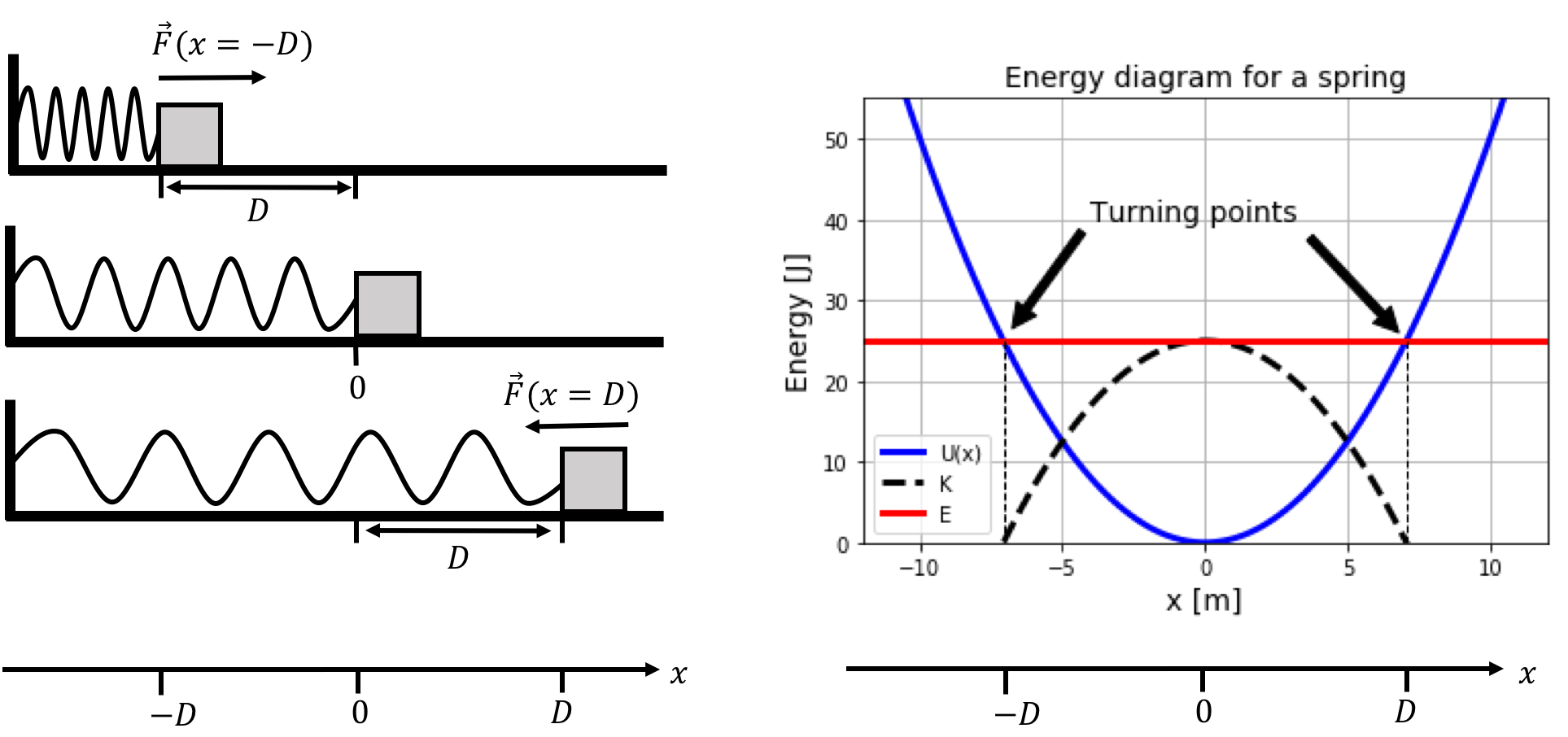
Consider a block that can slide on a frictionless horizontal surface and that is attached to a spring, as is shown in Figure 10 (left side), where x=0 is chosen as the position corresponding to the rest length of the spring. If you push on the block so as to compress the spring by a distance D and then release it, the block will initially accelerate because of the spring force in the positive x direction until the block reaches the rest position of the spring (x=0 on the diagram). When it passes that point, the spring will exert a force in the opposite direction. The block will continue in the same direction and decelerate until it stops and turns around. It will then accelerate again towards the rest position of the spring, and then decelerate once the spring starts being compressed again, until the block stops and the motion repeats. We say that the block “oscillates” back and forth about the rest position of the spring.
We can describe the motion of the block in terms of its total mechanical energy, E. Its potential energy is given by:
On the right of Figure 10 is an “Energy Diagram” for the block, which allows us to examine how the total energy, E, of the block is divided between kinetic and potential energy depending on the position of the block. The vertical axis corresponds to energy and the horizontal axis corresponds to the position of the block.
The total mechanical energy, E=25J, is shown by the horizontal red line. Also illustrated are the potential energy function (U(x) in blue), and the kinetic energy, (K=E−U(x), in dotted black).
Figure 10:Left: The block oscillates about the rest position of the spring, between x=−D and x=D. Right: The energy diagram for the block. This diagram is for a spring with spring constant k=1N/m.
The energy diagram allows us to describe the motion of the object attached to the spring in terms of energy. A few things to note:
At x=±D, the potential energy is equal to E, so the kinetic energy is zero. The block is thus instantaneously at rest at those positions.
At x=0, the potential energy is zero, and the kinetic energy is maximal. This corresponds to where the block has the highest speed.
The kinetic energy of the block can never be negative[18], thus, the block cannot be located outside the range [−D,+D], and we would say that the motion of the block is “bound”. The points between which the motion is bound are called “turning points”.
An analysis of the energy diagram tells us that the block is bound between the two turning points, which themselves are equidistant from the origin. When we initially compress the spring, we are “giving” the block “spring potential energy”. As the block starts to move, the potential energy of the block is converted into kinetic energy as it accelerates and then back into potential energy as it decelerates.
By looking at only the potential energy function, without knowing that it is related to a spring, we can come to the same conclusions; namely that the motion is bound as long as the total mechanical energy is not infinite. We call the point x=0 a “stable equilibrium”, because it is a local minimum of the potential energy function. If the object is displaced from the equilibrium point, it will want to move back towards that point. This can also be understood in terms of the force associated with the potential energy function:
The local minimum occurs where the derivative of the potential function is equal to zero. Thus, the equilibrium point is given by the condition that the force associated with the potential is zero (x=0 in the case of the potential energy from a spring). The equilibrium is a stable equilibrium because the force associated with the potential energy function (F(x)=−kx for the spring) points towards the equilibrium point.
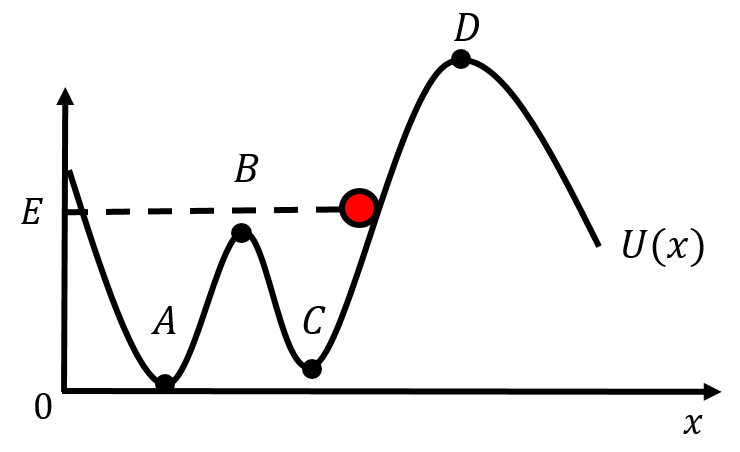
The potential energy function for an object with total mechanical energy, E, can be thought of as a little “roller coaster”, on which you place a marble and watch it “roll down” the potential energy function. You can think of placing a marble where U(x)=E and releasing it. The marble would then roll down the potential energy function, just as an actual marble would roll down a real slope, mimicking the motion of the object along the x axis. This is illustrated in Figure 11 which shows an arbitrary potential energy function and a marble being placed at a location where the potential energy is equal to E.
Figure 11:Arbitrary potential energy function and illustration of visualizing a marble rolling down the function by placing the marble on the potential energy function at a point where U(x)=E.
The motion of the marble will be bound between the two points where the potential energy function is equal to E. When the marble is placed as shown, it will roll towards the left, just as if it were a real marble on a track. Since the potential energy is increasing as a function of x at the point where we placed the marble, the force is in the negative x direction (remember, the force is the negative of the derivative of the potential energy function). With the given energy, the marble would never be able to make it to point D, as it does not have enough energy to “climb up the hill”. It would roll down, through point C, up to point B, down to point A, and then turn around where U(x)=E and return to where it started.
Locations A and C on the diagram are stable equilibria, because if a marble is placed in one of those locations and nudged slightly, it will come back to the equilibrium point (or oscillate about that point). Points B and D are “unstable equilibria”, because if the marble is placed there and nudged, it will not immediately come back to those points. Note that if the marble were placed at point D and nudged towards the right, the motion of the marble would be unbound on the right, and it would keep going in that direction.
Now, say an object’s potential energy is described by the function in Figure 11, and the object has total energy E. The object’s motion along the x axis will be exactly the same as the projection of the marble’s motion on the x axis.
8.6Using PhET to explore the Work-Energy Theorem and Energy Diagrams¶
Consider a skater who can skate on a frictionless parabolic surface as shown in the PhET simulation below. Choose the “Graphs” tab. If you place the skater at the top of the ramp, they will accelerate down the ramp due to their gravitational potential energy. When they pass the lowest point, we consider the gravitational potential energy to be zero. The skater will continue in the same direction and decelerate until they stop at some height on the ramp and turn around. They will then accelerate again towards the rest position of the ramp (y=0m), and then decelerate once the skater starts up the ramp again. This motion will repeat endlessly in the absence of non-conservative external forces.
We can describe the motion of the skater in terms of their total mechanical energy, E.
In the simulation is an Energy Diagram for the skater, which allows us to examine how their total energy, E. Without friction, the energy is divided between kinetic and potential energy depending on the position of the skater on the ramp. The vertical axis corresponds to energy and the horizontal axis corresponds to the position of the skater.
8.7Advanced Topic: The Lagrangian formulation of classical physics¶
So far, we have seen that, based on Newton’s Laws, one can formulate a description of motion that is based solely on the concept of energy. A lot of research was done in the eighteenth century to reformulate a theory of mechanics that would be equivalent to Newton’s Theory but whose starting point is the concept of energy instead of the concept of force. This “modern” approach to classical mechanics is primarily based on the research by Lagrange and Hamilton.
Although it is beyond the scope of this text to go into the details of this formulation, it is worth taking a quick look in order to get a better sense of how physicists seek to generalize theories. It is also worth noting that the Lagrangian formulation is the method by which theories are developed for quantum mechanics and modern physics.
The Lagrangian description of a “system” is based on a quantity, L, called the “Lagrangian”, which is defined as:
where K is the kinetic energy of the system, and U is its potential energy. A “system” can be a rather complex collection of objects, although we will illustrate how the Lagrangian formulation is implemented for a single object of mass m moving in one dimension under the influence of gravity. Let x be the direction of motion (which is vertical) such that the potential and kinetic energies of the object are given by:
where L can depend on time explicitly or implicitly (through the fact that position and velocity, on which the Lagrangian depends, are themselves time-dependent). The requirement that the above integral be minimized is called the “Principle of Least Action”[19], and is thought to be the fundamental principle that describes all of the laws of physics. The condition for the action to be minimized is given by the Euler-Lagrange equation:
Thus, in the Lagrangian formulation, one first writes down the Lagrangian for the system, and then uses the Euler-Lagrange equation to obtain the “equations of motion” for the system (i.e. equation that give the kinematic quantities, such as acceleration, for the system).
Given the Lagrangian that we found above for a particle moving in one dimension under the influence of gravity, we can determine each term in the Euler-Lagrange equation:
which is exactly equivalent to using Newton’s Second Law (the second last step is equivalent to F=ma). In the Lagrangian formulation, we do not need the concept of force. Instead, we describe possible “interactions” by a potential energy function. That is why you may sometimes hear of physicists talking about the “Weak interaction” instead of the “Weak force” when they are talking about one of the four fundamental interactions (forces) of Nature. This is because, in the modern formulation of physics, one does not use the concept of force, and instead thinks of potential energy functions to model what we would call a force in the Newtonian approach.
Emmy Noether, a mathematician in the early twentieth century, proved a theorem that makes the Lagrangian formulation particularly aesthetic.
Noether’s theorem states that for any symmetry in the Lagrangian, there exists a quantity that is conserved. For example, if the Lagrangian does not depend explicitly on time, then a quantity, which we call energy, is conserved[20].
The Lagrangian that we had above for a particle moving under the influence of gravity did not depend on time explicitly, and thus energy is conserved (gravitational potential energy is converted into kinetic energy and there are no non-conservative forces). If the Lagrangian did not depend on position, then a quantity that we call “momentum”[21] would be conserved. In this case, momentum in the x direction was not conserved because the Lagrangian depended on x through the potential energy.
Equivalently, the force is conservative if the work done by the force on an object moving from position A to position B does not depend on the particular path between the two points. The conditions for a force to be conservative are given by:
In particular, a force that is constant in magnitude and direction will be conservative. A force that depends on quantities other than position (e.g. speed, time) will not be conservative. The force exerted by gravity and the force exerted by a spring are conservative.
For any conservative force, F(r), we can define a potential energy function, U(r), that can be used to calculate the work done by the force along any path between position A and position B:
where the change in potential energy function in going from A to B is equal to the negative of the work done in going from point A to point B. We can determine the function U(r) by calculating the work integral over an “easy” path (e.g. a straight line that is co-linear with the direction of the force).
It is important to note that an arbitrary constant can be added to the potential energy function, because only differences in potential energy are meaningful. In other words, we are free to choose the location in space where the potential energy function is defined to be zero.
We can break up the net work done on an object as the sum of the work done by conservative (WC) and non-conservative forces (WNC):
where ΔU is the difference in the total potential energy of the object (the sum of the potential energies for each conservative force acting on the object).
The Work-Energy Theorem states that the net work done on an object in going from position A to position B is equal to the object’s change in kinetic energy:
In particular, if no non-conservative forces do work on an object, then the change in total potential energy is equal to the negative of the change in kinetic energy of the object:
In particular, if no net work is done on the object by non-conservative forces, then the mechanical energy of the object does not change (ΔE=0). In this case, we say that the mechanical energy of the object is conserved.
The Lagrangian description of classical mechanics is based on the Lagrangian, L:
which is the difference between the kinetic energy, K, and the potential energy, U, of the object. The equations of motion are given by the Principle of Least Action, which leads to the Euler-Lagrange equation (written here for the case of a particle moving in one dimension):
The two forces acting on the ball are gravity and the spring force. Both are conservative, so we can use conservation of mechanical energy. We will find the energy of the ball when it is at a height h above the spring, and the energy of the ball when the spring is fully compressed. Then, we will use conservation of mechanical energy to determine the compression of the spring.
Remember that the total mechanical energy is the sum of the total potential energy and the kinetic energy, E=U+K. Let’s call the initial position of the ball A and the final position of the ball B. You will notice that we set up our coordinate system so that y is positive upwards, with y=0 at the point where the ball comes into contact with the spring. We choose to define both the gravitational potential energy and spring potential energy so that they are zero at y=0.
Since the ball starts from rest, its kinetic energy is zero at position A. At this point, the ball is not touching the spring, so the potential energy from the spring force is zero. The mechanical energy of the ball at position A is simply equal to its gravitational potential energy:
At position B, the ball is again at rest, so the kinetic energy of the ball is zero. Now that the ball is in contact with the spring, it will experience a force from the spring that can be modelled with a potential energy U(y)=21ky12, where y1 is the distance between the rest position of the spring and its compressed length. At point B (y=−y1), the ball will have both spring and gravitational potential energy, so its mechanical energy at position B is given by:
We now have an expression for the amount the spring is compressed, y1, in terms of our known values.
Solution 8.2
We are going to find a general expression for the energy of the system, and then use this expression to find the velocity at any point. There are two forces acting on the mass:
The force of tension (from the string). This force is perpendicular to the direction of motion at any point, so it does no work on the mass.
The force of gravity, which has a potential energy function given by U(y)=mgy. We choose the gravitational potential energy to be zero when the pendulum hangs vertically (when θ=0 and y=0).
The mechanical energy of the mass is conserved, and at any point is given by the sum of its kinetic and its gravitational potential energies:
We want to find the velocity as a function of θ, so we need to write y in terms of θ. As you may recall from Problem 7.2, we saw that from the geometry of the problem, we can express the height of the mass as y=L−Lcosθ, or L(1−cosθ), where y is the height as measured from the bottom point of the motion. You can refer to Figure 30 to refresh your memory. The energy at any point is then:
Conservation of energy tells us that the total energy at any point must be the same as the initial energy. So, we can use our initial conditions to find the total energy of the system. The mass starts from rest (initial kinetic energy is zero) an angle θ0 above the vertical:
Discussion: We can see from this expression that the speed will be maximized when cosθ is maximized, which will occur when θ=0 (when the pendulum is vertical). This is as we expected. We can also see that we will get an imaginary number if the magnitude of θ is greater than θ0, showing that the motion is constrained between −θ0 and θ0. Finally, we showed that the velocity of the pendulum does not depend on the mass!
Solution 8.3
We are going to find an equation of motion of the system using the Lagrangian method. We choose to use a one dimension coordinate system, with the x axis defined to be co-linear with the spring, positive in the direction where the spring is extended, and set the origin to be located at the rest position of the spring. The kinetic energy and potential energy of the mass are given by
since the only force exerted on the mass that can do work is the force from the spring. We have chosen the potential energy to be zero at x=0. The Lagrangian for this system is:
This is why we defined potential energy as negative of the work; it becomes a positive term when we move it to the same side of the equation as the kinetic energy!
Remember, the kinetic energy is given by K=21mv2. Since neither mass nor the value of v2 can be negative, the kinetic energy of an object can never be negative.
If the Lagrangian does not depend on time, then we can shift the system in time and the equations of motion would be unaffected. We say that the Lagrangian is symmetric, or unaffected, by changes in time.