In this chapter, we introduce a new way to build models derived from Newton’s theory of classical physics. We will introduce the concepts of work and energy, which will allow us to model situations using scalar quantities, such as energy, instead of vector quantities, such as forces. It is important to remember that even when we are using energy and work, these tools are derived from Newton’s Laws; that is, we may not be using Newton’s Second Law explicitly, but the models that we develop are still based on the same theory of classical physics.
We introduce the concept of work as the starting point for building models using energy instead of forces. Work is a scalar quantity that is meant to represent how a force exerted on an object over a given distance results in a change in speed of that object. We will first introduce the concept of work done by a force on an object, and then look at how work can change the kinematics of the object. This is analogous to how we first defined the concept of force, and then looked at how force affects motion (by using Newton’s Second Law, which connected the concept of force to the acceleration of the object).
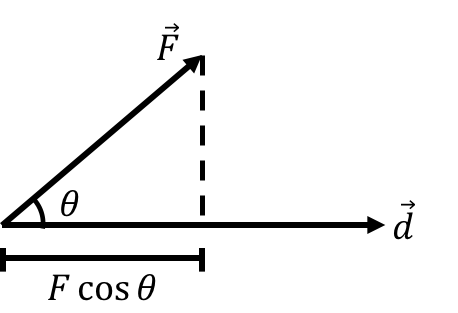
The work done by a force, F, on an object over a displacement, d, is defined to be:
where θ is the angle between the vectors when they are placed tail to tail, as in Figure 1. The dimension of work, force times displacement, is also called “energy”. The S.I. unit for energy is the Joule (abbreviated J) which is equivalent to Nm or kgm2/s2 in base units.
Figure 1:When determining the scalar product F⋅d=Fdcosθ, θ is the angle between the vectors when they are placed tail to tail.
The work “done” by the force is the scalar product of the force vector and the displacement vector of the object. We say that the force “does work” if it is exerted while the object moves (has a displacement vector) and in such a way that the scalar product of the force and displacement vectors is non-zero. A force that is perpendicular to the displacement vector of an object does no work (since the scalar product of two perpendicular vectors is zero). A force exerted in the same direction as the displacement will do positive work (cosθ positive), and a force in the opposite direction of the displacement will do negative work (cosθ negative). As we will see, positive work corresponds to increasing the speed of the object, whereas negative work corresponds to decreasing its speed. No work corresponds to no change in speed (but could corresponds to a change in velocity).
You may be tempted to ask, “Why work? Why not something else? Why that scalar product in particular? How could we possibly have thought of that?”. In general, it seems arbitrary that we introduce the quantity “work” and then find that it leads to a convenient way of building models. However, we did not just pull this quantity out of thin air! Many theorists, over many years, tried all sorts of quantities and ways to rephrase Newton’s Theory that were not helpful. The quantities that make it into textbooks are the ones that turned out to be useful. You should also keep in mind that, just like force, work is a “made-up” mathematical tool that is helpful in describing the world around us. There is no such thing as work or energy; they are just useful mathematical tools.
Work involves vectors, so we can first examine the concept in one dimension, before extending this to two and three dimensions. We can choose x as the coordinate in one dimension, so that all vectors only have an x component. We can write a force vector as F=Fx^, where F is the x component of the force (which could be positive or negative). A displacement vector can be written as d=dx^, where again, d is the x component of the displacement, and can be positive or negative. In one dimension, work is thus:
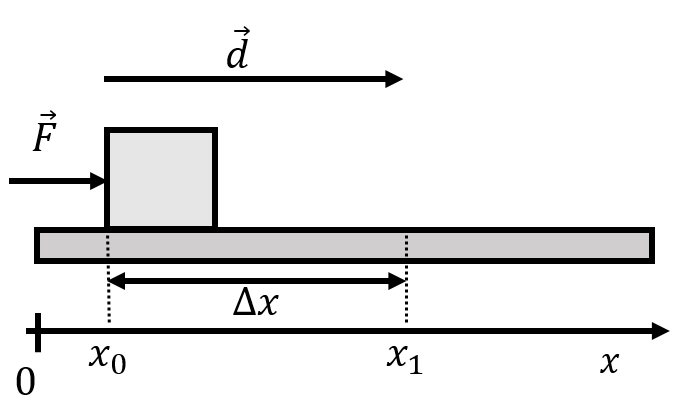
where x^⋅x^=1. Consider, for example, the work done by a force, F, on a box, as the box moves along the x axis from position x=x0 to position x=x1, as shown in Figure 3.
Figure 3:A force, F, exerted on an object as it moves from position x=x0 to position x=x1.
We can write the length of the displacement vector as ∣∣d∣∣=d=Δx=x1−x0. The work done by the force is given by:
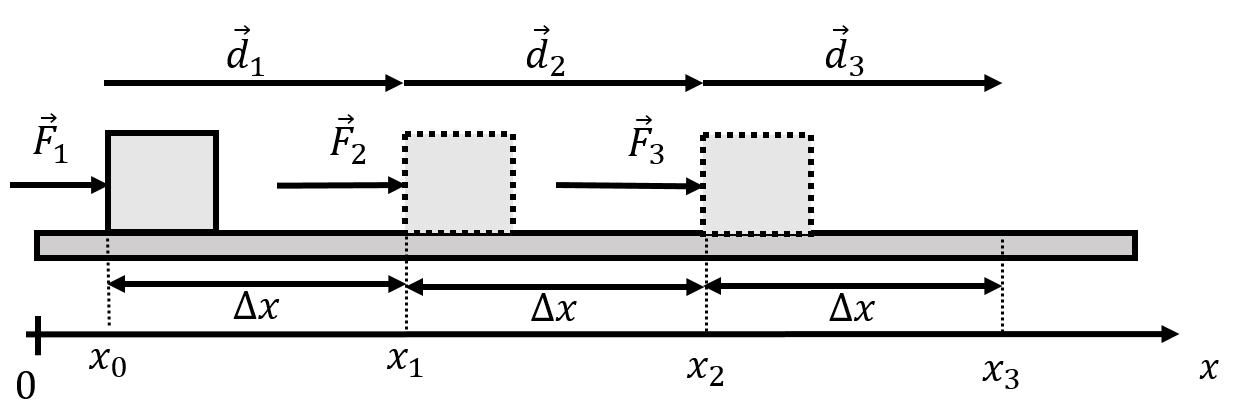
Suppose that instead of a constant force, F, we have a force that changes with position, F(x), and can take on three different values between x=x0 and x=x3:
as illustrated in Figure 3, which shows the force on an object as it moves from position x=x0 to position x=x3, along three (equal) displacement vectors, d1=d2=d3=Δxx^.
Figure 4:A varying force, F(x), exerted on an object as it moves from position x=x0 to position x=x3.
The total work done by the force over the three separate displacements is the sum of the work done over each displacement:
If instead of 3 segments we had N segments and the x component of the force had the N corresponding values Fi in the N segments, the total work done by the force would be:
where we introduced a vector Δx to be the vector of length Δx pointing in the positive x direction. In the limit where F(x) changes continuously as a function of position, we take the limit of an infinite number of infinitely small segments of length dx, and the sum becomes an integral:
where the work was calculated in going from x=x0 to x=xf, and dx=dxx^ is an infinitely small displacement vector (of length dx) in the positive x direction.
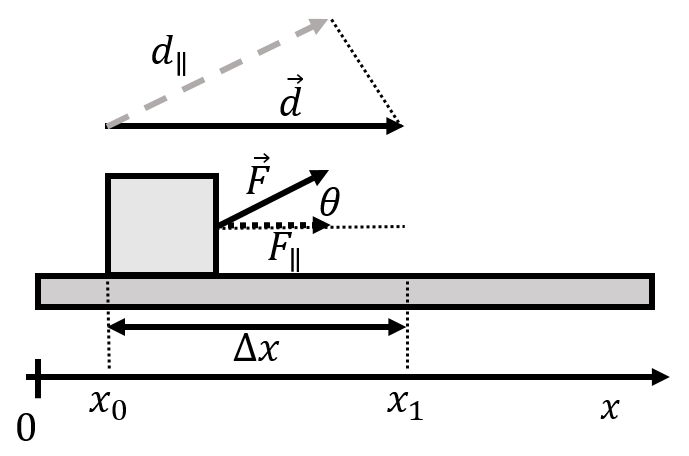
First, consider the work done by a force F in pulling a crate over a displacement d, in the case where the force is directed at an angle θ above the horizontal, as shown in Figure 6, and the displacement is along the x axis (or rather, we chose the x axis to be parallel to the displacement).
Figure 6:A force, F, exerted on an object as it moves from position x=x0 to position x=x1.
where we highlighted the fact that the scalar product “picks out” components of vectors that are parallel to each other. F∥=Fcosθ is the component of F that is parallel to d, and d∥=dcosθ is the component of d that is parallel to F. These are also shown in Figure 6.
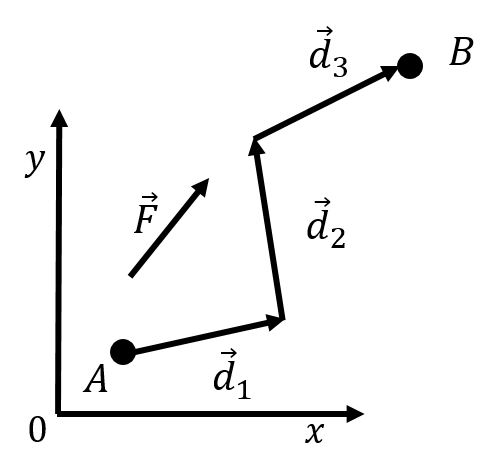
In general, if an object is moving along an arbitrary path, we cannot choose the x axis to be parallel to the displacement or to the force. If the path can be sub-divided into straight segments over which the force is constant, as in Figure 7, we can calculate the work done by the force over each segment and add the work done in each segment together to obtain the total work done by the force. Note that, in general, the work done by a force as an object moves from one position to another depends on the particular path that was taken between the two positions, since different paths will have difference lengths.
Figure 7:An arbitrary two dimensional path of an object from A to B broken into three straight segments.
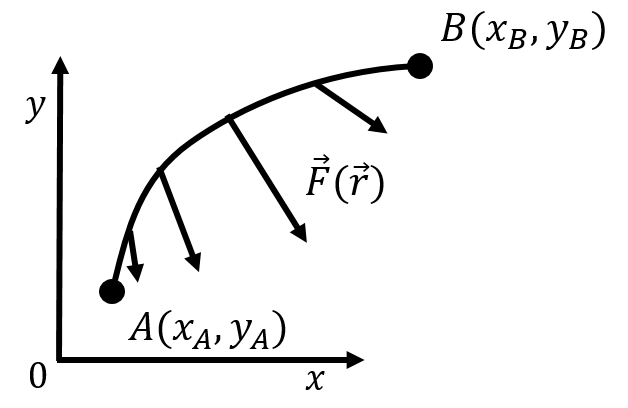
The most general case for which we can calculate the work done by a force is the case when the force changes continuously along a path where the displacement also changes direction continuously. This is illustrated in Figure 11 which shows an arbitrary path between two points A and B, and a force, F(r), that depends on position (r). In general, the work done by the force on an object that goes from A to B will depend on the actual path that was taken.
Figure 11:An arbitrary path between two points A and B with a force that depends on position, F(r).
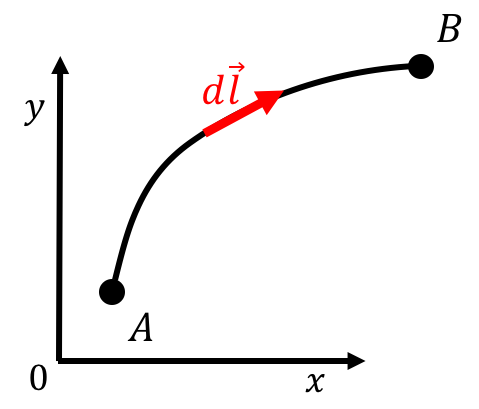
The strategy for calculating the work in the general case is the same: we break up the path into small straight segments with displacement vectors dl (Figure 12) where we assume that the force is constant over the segment. The total work is the sum of the work over each segment:
As usual, we use the integral symbol to indicate that you need to take an infinite number of infinitely small segments dl in order to calculate the sum.
Figure 12:We divide the path into infinitesimally small segments with displacement vectors dl.
You should note that this is not an integral like any other that we have seen so far: the integral is not over a single integration variable (usually we use x), but it is the integral (the sum!) over the specific path that we have chosen in going from A to B. This is called a “path integral”, and is generally difficult to evaluate.
So far, we have considered the work done on an object by a single force. If more than one force is exerted on an object, then each force can do work on the object, and we can calculate the “net work” done on the object by adding together the work done by each force. We will show that this is equivalent to first calculating the net force on the object, Fnet (i.e. the vector sum of the forces on the object), and then calculating the work done by the net force.
Suppose that three forces, F1, F2, and F3 are exerted on an object as it moves such that its displacement vector is d. The net work done on the object is easily shown to be equivalent to the work done by the net force::
where Fnet=F1+F2+F3 is the net force. The result is easily generalized to any number of forces, including if those forces change as a function of position:
At this point, you should be comfortable calculating the net work done on an object upon which several forces are exerted. As we saw in the previous section, the net work done on an object is connected to the object’s acceleration; if the net force on the object is zero, then the net work done and acceleration are also zero. In this section, we derive a new quantity, kinetic energy, which allows us to connect the work done on an object with its change in speed. This will allow us to describe motion using only scalar quantities. Like the definition of work, the following derivation appears to “come out of thin air”. Remember, though, that theorists have tried all sorts of mathematical tricks to reformulate Newton’s Theory, and this is the one that worked.
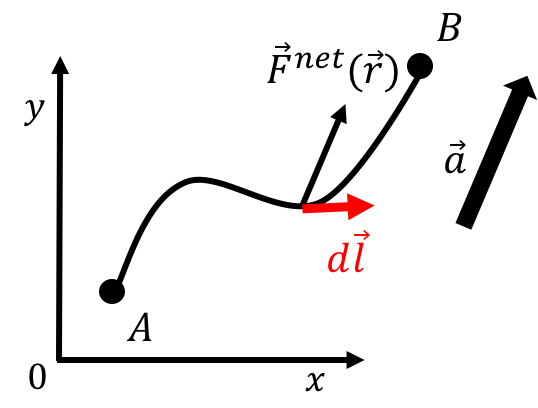
Consider the most general case of an object of mass m acted upon by a net force, Fnet(r), which can vary in magnitude and direction. We wish to calculate the net work done on the object as it moves along an arbitrary path between two points, A and B, in space, as shown in Figure 17. The instantaneous acceleration of the object, a, is shown along with an “element of the path”, dl.
Figure 17:An object moving along an arbitrary path between points A and B that is acted upon by a net force Fnet.
and is in general a difficult integral to evaluate for an arbitrary path. Our goal is to find a way to evaluate this integral by finding a function, K, with the property that:
That is, we will only have to evaluate K at the end points of the path in order to determine the value of the integral. In this way, the function K is akin to an anti-derivative.
In order to determine the form for the function K, we start by noting that, by using Newton’s Second Law, we can write the integral for work in terms of the acceleration of the object:
where we assumed that the mass of the object does not change along the path and can thus be factored out of the integral. Consider the scalar product of the acceleration, a, and the path element, dl=dxx^+dyy^+dzz^, written in terms of the velocity vector:
Any of the terms in the sum can be re-arranged so that the time derivative acts on the element of path (dx, dy, or dz) instead of the velocity, for example:
which corresponds to the sum of three integrals over the three independent components of the velocity vector. The components of the velocity vector are functions that change over the path and have fixed values at either end of the path. Let the velocity vector of the object at point A be vA=(vAx,vAy,vAz) and the velocity vector at point B be vB=(vBx,vBy,vBz). The integral over, say, the x component of velocity is then:
where we recognized that the magnitude (squared) of the velocity is given by vA2=vAx2+vAy2+vAz2. We have thus arrived at our desired result; namely, we have found a function of speed, K(v), that when evaluated at the endpoints of the path allows us to calculate the net work done on the object over that path:
That is, if you know the speed at the start of the path, vA, and the speed at the end of the path, vB, then the net work done on the object along the path between A and B is given by:
We call K(v) the “kinetic energy” of the object. We can say that the net work done on an object in going from A to B is equal to its change in kinetic energy (final kinetic energy minus initial kinetic energy). It is important to note that we defined kinetic energy in a way that it is equal to the net work done. You may have already seen kinetic energy from past introductions to physics as a quantity that is just given; here, we instead derived a function that has the desired property of being equal to the net work done and called it “kinetic energy”.
The relation between the net work done and the change in kinetic energy is called the “Work-Energy Theorem” (or Work-Energy Principle). It is the connection that we were looking for between the dynamics (the forces from which we calculate work) and the kinematics (the change in kinetic energy). Unlike Newton’s Second Law, which relates two vector quantities (the vector sum of the forces and the acceleration vector), the Work-Energy Theorem relates two scalar quantities to each other (work and kinetic energy). Although we introduced the kinetic energy as a way to calculate the integral for the net work, if you know the value of the net work done on an object, then the Work-Energy Theorem can be used to calculate the change in speed of the object.
Most importantly, the Work-Energy theorem introduces the concept of “energy”. As we will see in later chapters, there are other forms of energy in addition to work and kinetic energy. The Work-Energy Theorem is the starting point for the idea that you can convert one form of energy into another. The Work-Energy Theorem tells us how a force, by doing work, can provide kinetic energy to an object or remove kinetic energy from an object.
In the PhET simulation below, click on the “Measure” tab. Leave all of the default settings as they are. Place the skater at the top of the ramp and release them. They should continue to skate up and down the ramp endlessly since there is no friction. Place the measurement sensor at the top of the ramp. Attempt to adjust the sensor until the kinetic energy reads zero as the skater passes the sensor.
Does the sensor’s measurement of potential energy agree with the amount of work you calculated above? If the kinetic energy is not zero, does the sum of potential and kinetic energy sum to the calculated energy above?
Figure 20:A PhET simulation to explore work-energy.
Move the measurement sensor to the bottom of the ramp. Try to place it so that the potential energy is zero. How does the kinetic energy compare to the calculation of gravitational work from above?
Next, increase and decrease the skater’s mass. Notice their motion does not change. This is seemingly a contradiction. Can you explain why this scenario has mass independent motion?
Now, set the friction to a small value. What do you observe happening? Place the measuring sensor somewhere on the ramp. You should notice the thermal energy has a value when it did not when there was no friction. Where is the skater’s energy going?
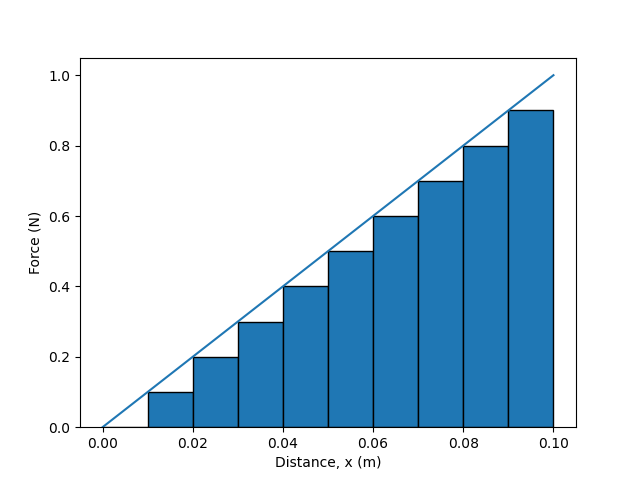
It’s possible, many students in Physics 1 have not had Calculus 2, and integrals are not familiar. Let’s take a graphical look at the work. In Figure 21, a constant 10N net force is moving an object at constant velocity over a distance of 0.1m. The action is split into ten segments. Considering the relationship
we can see that when the force and displacement are aligned, the work is W=∣F∣∣d∣=Fd. This is the height times width, or area, of the graph. We could break the graph into segments and add the segments. As described in the previous section, the area of the segments can be written Fi⋅Δx and summed to obtain the full area of the graph of F vs. x.
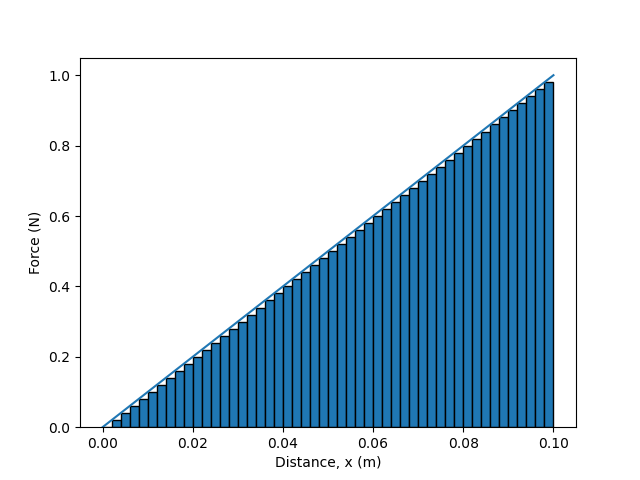
Next, let’s look at the spring example from Section 7.3. Instead of compressing the spring we will consider stretching the spring in the +x^-direction. The force applied to stretching the spring is F=kxx^. If we plot F vs. x for stretching a spring with spring constant k=10N/m from x=0 to x=0.1 meters, we get the graph shown in Figure 22. We can see that the force increases linearly with displacement. When we divide the displacement into intervals, we no longer can fit rectangular areas to fully describe the area of the force vs. displacement. That is okay, we can approximate the area with these rectangular areas.
Figure 22:Force vs. displacement for stretching a spring with k=10N/m a distance of 0.1m. The graph is split into 10 segments.
Let’s compare to the work computed from integration in the previous section.
We could improve our approximation by dividing the F vs. x graph into smaller intervals as shown in Figure 23. The calculation using a table would be tedious. Let’s see how a computer can help us solve this problem.
Figure 23:Force vs. displacement for stretching a spring with k=10N/m a distance of 0.1m. The graph is split into 50 segments.
In the trinket below we will compute the spring force as a function of stretch distance. First, we should define some variables such as the spring constant k, the total stretch distance x, the intervals of stretch Δx, and the work W. The total distance and the work are going to be summed in a loop. So, we initialize them to zero. We’ll begin by repeating the calculation above to make sure we get the expected results.
k = 10 #spring constant in N/m
x = 0 #total stretch distance
dx = 0.01 #stretch interval
W = 0
Next, we will create a loop that continues while the stretch is less than 0.1 meters. This should make the last left edge be x=0.09 and the last Δx=0.1−0.09. Inside that loop we want to calculate the force at the left side of the rectangle (this is x. Then, add the work this force does over the increment of displacement FΔx to the work that has been done in previous increments of displacement. We’ll print the results that are in the table above, and we can’t forget to increment x for the next loop.
while x < 0.1:
rate(2)
F = k*x #force at left side of interval
W = W + F*dx
print(x, F, W)
x = x + dx
Run this code to see that it works to produce the values in the table above. If you want to create more intervals, you only need to decrease the value of Δx or dx in your code. Try changing this value to dx=0.005 (20 intervals). Then, try dx = 0.001. Does this make the summation closer to the exact value of W=21kx2=0.05J? How small does dx need to be to be within 1% of the exact value?
Figure 24:An empty trinket for doing numerical calculation of work.
For fun, we can graph and simulate the scenario of stretching a spring. To create a graph add the following two lines after the Web VPython 3.2 line. This will create a graph and f1 is the data that is displayed on the graph.
spring_graph = graph(xtitle='x (m)', ytitle='W (J)')
f1 = gdots(color=color.red)
On the line after the calculation of work in the loop, add the following line to put position on the x-axis and work on the y-axis. This will add a single point to the graph each time the loop iterates.
f1.plot(x, W) #add this data point to a graph
Check that this works properly in your trinket. Once that works, you can add an object simulation. After the line with f1, create a spring with the following code.
We finish the chapter by introducing the concept of “power”, which is the rate at which work is done on an object, or more generally, the rate at which energy is being converted from one form to another. If an amount of work, ΔW, was done in a period of time Δt, then the work was done at a rate of:
where P is called the power. The SI unit for power is the “Watt”, abbreviated W, which corresponds to J/s=kgm2/s3 in base SI units. If the rate at which work is being done changes with time, then the instantaneous power is defined as:
You have probably already encountered power in your everyday life. For example, your 1000W hair dryer consumes “electrical energy” at a rate of 1000J per second and converts it into the kinetic energy of the fan as well as the thermal energy to heat up the air. Horsepower (hp) is an imperial unit of power that is often used for vehicles, the conversion being 1hp=746W. A 100hp car thus has an engine that consumes the chemical energy released by burning gasoline at a rate of 7.46e4J per second and converts it into work done on the car as well as into heat.
If multiple forces are exerted on an object, then one can calculate the net force on the object (the vector sum of the forces), and the net work done on the object will be equal to the work done by the net force:
The Work-Energy Theorem states that the net work done on an object in going from position A to position B is equal to the object’s change in kinetic energy:
a. We start by defining a coordinate system. We choose the x axis to be horizontal and positive in the direction of motion, and we choose the y axis to be vertical and the positive direction upwards.
We will determine the speed at the top of the ramp, vt, using the Work-Energy Theorem:
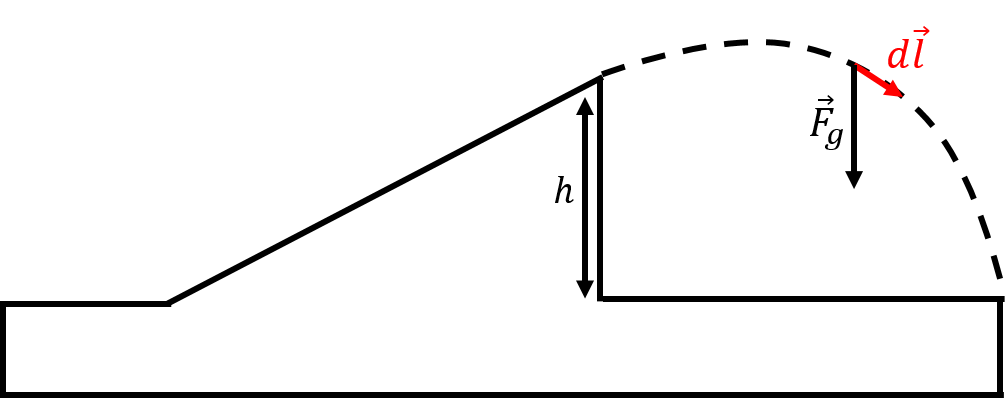
where Wnet is the net work done on the skier as they “fly” through the air. While the skier is in the air, the only force acting on them is gravity, F=−mgy^. The path of the skier is a parabola, so that the displacement vector changes direction continuously. The work done by gravity is given by:
The work done by gravity is positive, which makes sense, since the force of gravity is generally in the same direction as the net displacement (downwards). We did not need to take into account the specific shape of the trajectory, because the force was constant in magnitude and direction (see Example 7.4).
We can now find the speed of the skier when they leave the jump using the Work-Energy theorem:
b. We can again use the Work-Energy Theorem to determine the work done by friction as the skier slides up the ramp. We know that the speed of the skier at the bottom of the ramp is vi, and we just found that the speed of the skier at the top of the ramp is vt=vf2−2gh. The net work done on the skier going up the ramp is equal to:
The net work done is also the sum of the work done by each of the forces acting on the skier as they slide up the ramp. The forces on the skier are the force of gravity, the force of friction, and the normal force. The normal force does no work, since it is always perpendicular to the displacement. The net work is thus the sum of the work done by the force gravity, Wg, and the work done by the force of friction, Wf, over the displacement corresponding to the length of the ramp:
where d is the displacement vector up the ramp (unknown horizontal distance, dx, and vertical distance, h). We can now determine the work done by the force of friction:
And we find that the force of friction did negative work (it reduced the kinetic energy of the skier).
Discussion: Over the course of the jump, the skier started at the bottom of the ramp with a given kinetic energy, then lost some of that energy going up the ramp (in the form of loss to friction and negative work done by gravity). During the airborne phase, gravity did positive work and the skier gained back some of the kinetic energy that they had lost going up the ramp. Thus the net work done by the force of friction is the difference in kinetic energies between the final landing point and the beginning of the ramp, because friction is the only force that did a net amount of (negative) work over the whole trajectory (gravity did no net work over the whole trajectory). This example shows how we can start to think about energy as something that is “conserved”, which we will explore in more detail in the next chapter.
Solution
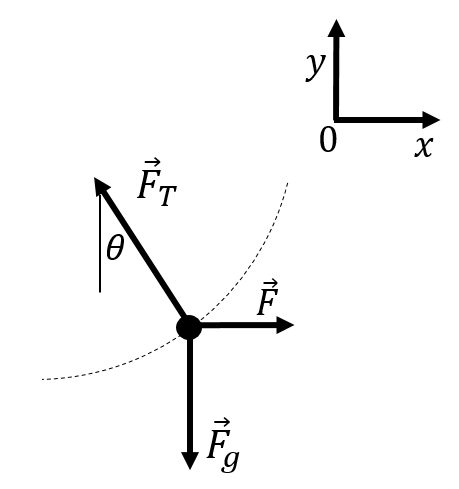
a. We want to find the work done by the applied force F. We first need to find an expression for the magnitude of F, based on the fact that the child is not accelerating. The forces on the child are:
Fg, their weight, with magnitude mg.
FT, the tension in the rope, which changes with the angle, θ.
F, the applied force, which change in magnitude as the angle, θ, changes.
Figure 28:A free-body diagram of the forces exerted on the child.
The child is moving at a constant speed, so the net force is equal to zero. The sum of the x and y components of the forces are equal to zero (Newton’s Second Law):
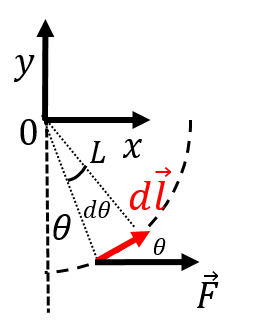
dl is the “path element” along part of the arc of circle over which the child moves, as illustrated in Figure 29. We have an expression for how F changes in magnitude as a function of the angle θ, and it would thus be convenient to perform the integral over the angle θ.
Figure 29:A path element along the circular trajectory of the swing.
We can use polar coordinate, (r,θ), instead of cartesian coordinates to describe the displacement vector, dl. If the vector subtends an arc on the circle that makes an infinitesimal angle, dθ, as illustrated, then the length of the vector dl is given by:
where L is the radius of the circle. The vector dl makes an angle θ with the horizontal, and thus with the vector, F. The dot product between F and dl can thus be written as:
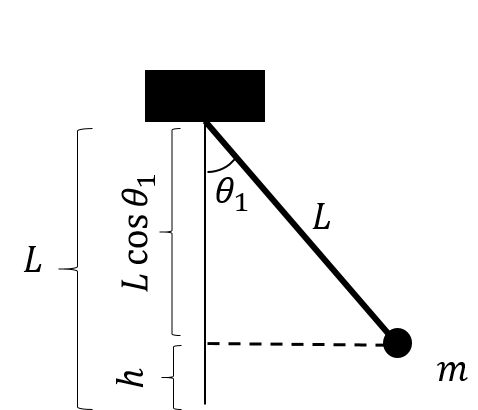
This can be illustrated on a diagram, as in Figure 30, which shows that h is equal to L−Lcosθ.
Figure 30:A diagram showing the geometry of the problem
Discussion: The net force acting on the mass is equal to zero, so the net work must be equal to zero. The two forces that do work on the mass are the applied force F, and gravity. The work done by the applied force if mgh, so the work done by gravity must be −mgh.