Chapter 22 - Electromagnetic induction
22.1Overview¶
In this chapter, we introduce the tools to model the connection between the magnetic and the electric field. In particular, we will see how a changing magnetic field can be used to induce an electric current, which is the basic principle behind the electric generators that power our life. We will also briefly discuss how electromagnetic waves are formed.
22.2Faraday’s Law¶
In the previous chapter, we described how an electric current produces a magnetic field. In this chapter, we describe how an electric current can be produced (or rather, “induced”) by a magnetic field. The most important aspect of electromagnetic induction is that it always involves quantities that change with time. In past chapters, we have only dealt with static electric and magnetic fields, static charges (for electric fields), and static currents (for magnetic fields).
Faraday’s law connects the flux of a time-varying magnetic field to an induced voltage (rather than a current). For historical reasons, the induced voltage is also called an induced “electromotive force” (emf), even if it is a voltage and not a force. Faraday’s law is as follows:
where is the induced voltage, and is the flux of the magnetic field through an open surface, defined in the same way as the flux of the electric field (Section 16.2):
If the magnetic field has a constant magnitude over the surface, , and always makes the same angle with the surface, then the flux can be written as:
where the magnitude of the vector is equal to the area of the surface, and the vector is normal to the surface.
The surface, , is defined by a closed path. The induced voltage can be thought of as an ideal battery placed in the closed path that defines the surface (right-hand panel of Figure 1). The minus sign in Faraday’s Law indicates the direction of the current associated with the induced voltage. It is important to note that an induced voltage only exists if the flux of the magnetic field changes (since the induced voltage is given by the time-derivative of the flux). Remember, induction is all about time-varying fields! This is better illustrated with an example.
Consider a loop of wire that is immersed in a uniform magnetic field, , that is perpendicular to the plane of the loop, as illustrated in Figure 1. As time goes by, the magnetic field increases in strength, as shown in going from the left panel to the right panel. The flux of the magnetic field through the loop increases in magnitude, and a voltage is thus induced across the wire (illustrated by the ideal battery on the loop in the right panel), leading to an induced current, .
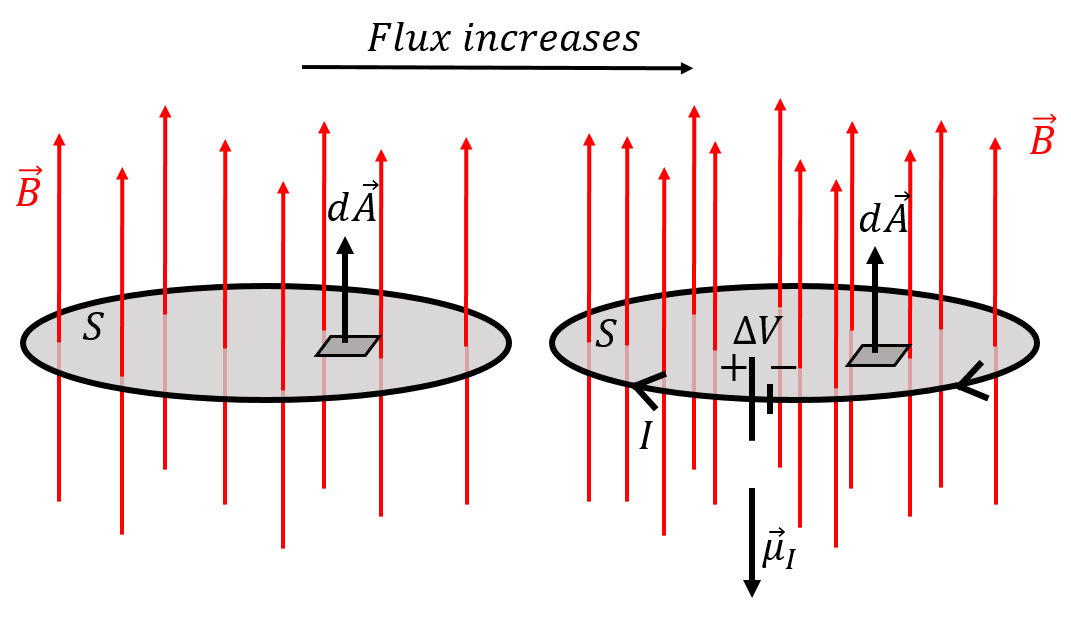
Figure 1:As the magnetic field increases, so does the flux through the loop that is shown. The changing flux results in an induced voltage, which produces an induced current that has a magnetic moment, . The induced current produces a magnetic field in a direction to oppose the changing flux.
When calculating the flux of the magnetic field, we have to choose the surface element vector, , to be perpendicular to the surface over which we calculate the flux. There are two choices[45] (upwards or downwards, referring to Figure 1); we chose to define to point upwards. Thus, the magnetic flux is positive in both panels, and increases with time. The derivative, , is positive and the right-hand side of Faraday’s equation is negative because of the negative sign in front. Had we chosen to define to point downwards, the right-hand side of Faraday’s law would be negative.
We can describe the direction of the induced current, , in terms of its magnetic dipole moment (Section 20.5.1), , also shown in Figure 1. The overall sign on the right-hand side of Faraday’s law is determined by our (arbitrary) choice of the direction . With this choice, we found that the right-hand side of Faraday’s law is negative:
The overall sign of indicates whether the magnetic moment of the induced current is parallel ( positive) or anti-parallel ( negative) to . This allows us to determine the direction of the induced current, and thus the direction of the ideal battery that represents the induced voltage. In general, when possible, it is common to choose the direction of to be parallel to the magnetic field vector, so that the flux is positive (although this does not guarantee that its derivative is positive).
22.2.1Lenz’s law¶
The minus sign in Faraday’s law is sometimes called “Lenz’s law”, and ultimately comes from the conservation of energy. In Figure 1 above, we found that as the magnetic flux increases through the loop, a current is induced. That induced current will also produce a magnetic field (in the direction of its magnetic dipole moment vector, ).
Lenz’s law states that the “induced current will always be such that the magnetic field that it produces counteracts the changing magnetic field that induced the current”. In Figure 1, the magnetic field points in the upwards direction, and increases in magnitude with time. The induced current produces a magnetic field that points downwards to counteract the changing magnetic field, and preserve a constant flux through the loop. If this were not the case, the induced current would be in the opposite direction, contributing to the increasing magnetic flux through the loop, inducing more current, producing more flux, inducing more current, etc. Clearly, this would lead to an infinite current and solve the world’s energy crisis. Unfortunately, conservation of energy (expressed here as Lenz’s law) prevents this from happening.
You can use Lenz’s law to determine the direction of induced currents. In general:
If the magnitude of the magnetic flux is increasing in the loop, then the induced current produces a magnetic field that is in the opposite direction from the original magnetic field.
If the magnitude of the magnetic flux is decreasing in the loop, then the induced current produces a magnetic field that is in the same direction as the original magnetic field.
The negative sign in Faraday’s law is not arbitrary (as we saw above, it gives the correct direction for the magnetic moment of the induced current, given our arbitrary choice of direction for ). In practice, one can often use Lenz’s law to determine the direction of the induced current (so that it counteracts the changing flux), and Faraday’s law to determine the magnitude of the induced voltage.
22.3Induction in a moving conductor¶
If we define a loop of wire, there are two ways in which the magnetic flux through that loop can change:
The magnetic field can change magnitude or direction, as we saw in Example 22.1.
The loop can change size or orientation relative to the magnetic field.
In this section, we examine the latter case, sometimes called “motional emf”, as the induced voltage is the result of motion from the loop in which the voltage is induced.
22.3.1Motion of a bar on two parallel rails¶
Consider a U-shaped rail in a uniform magnetic field on top of which a bar can slide with no friction, as illustrated in Figure 5. The bar of length moves to the right with a constant speed, .
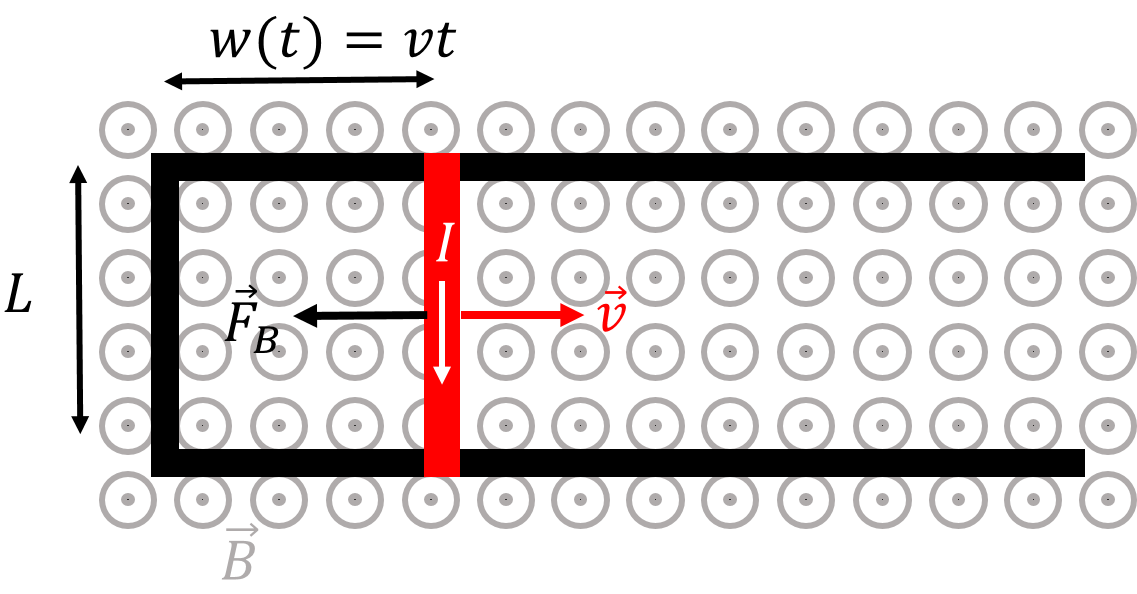
Figure 5:A U-shaped rail on top of which a bar of length, , can slide. The system is immersed in a magnetic field that points out of the page. The bar moves to the right with a constant speed, .
The bar and the rails form a closed loop of area:
that increases with time. The magnitude of the flux through the loop will increase with time, resulting in an induced current (clockwise, according to Lenz’s law). At some time , the flux through the loop is given by:
where we chose to be parallel to the magnetic field vector.
Since we already used Lenz’s law to argue that the current must be in the clockwise direction, we can use Faraday’s law to determine the magnitude of the induced voltage and ignore the negative sign:
Suppose that the rails are superconducting (have no resistance), and that the bar has a resistance, . The current through the loop is then given by Ohm’s Law:
As the current moves through the bar, it will heat up the bar by dissipating energy at a rate of:
Thus, the bar cannot possibly move at a constant speed on its own, or energy would be produced out of nothing. There must be a force exerted on the bar to keep it moving at constant speed.
Recall that a current-carrying wire in a magnetic field will experience a force from the magnetic field. In this case, the bar of length carries a current, , in a magnetic field, (perpendicular to the current), so that the force exerted on the bar is given by:
and points to the left (right-hand rule). The magnitude of the force is given by:
Thus, in order for the bar to move at constant velocity towards the right, a force with the same magnitude must be exerted towards the right. In other words, work must be done to pull the bar to the right, by exerting a force with the magnitude, . The rate at which that work must be done is given by:
where we assumed that the bar moves in the positive direction. This is exactly the rate at which electric energy is dissipated in the bar! In other words, by doing mechanical work on the bar, we can create an induced current that will dissipate that energy at the same rate at which we do work. We can convert mechanical work into electrical energy!
Finally, also note that this situation is closely related to the Hall effect, which is simply a different way to think about this problem. Consider the electrons that are in the bar, as the bar moves at constant speed to the right through the magnetic field (ignore the existence of the U-shaped rail). The electrons will experience a magnetic force that is upwards (consistent with the direction of the induced current discussed above). Eventually, electrons accumulate at the top of the bar, and start preventing more electrons from accumulating there, by producing an electric field, , in the bar. The equilibrium condition is that the magnetic force and the electric force have the same magnitude (and opposite directions):
The (Hall) potential difference, across the bar of length, , with an electric field, , is given by:
where we assumed that the electric field is uniform in the bar. This potential difference is identical to the one that we calculated from Faraday’s law. Viewing this example as a different manifestation of the Hall effect provides some insight into what is actually happening at the microscopic level when a current is induced.
22.3.2The generator¶
An electrical generator is used to create an alternating induced voltage/current by rotating a coil inside of a constant and uniform magnetic field. In this case, the current is induced because the angle between the magnetic field and the surface element vector changes with time.
Consider a single loop of wire with area that can rotate in a uniform and constant magnetic field, , as illustrated in Figure 6.
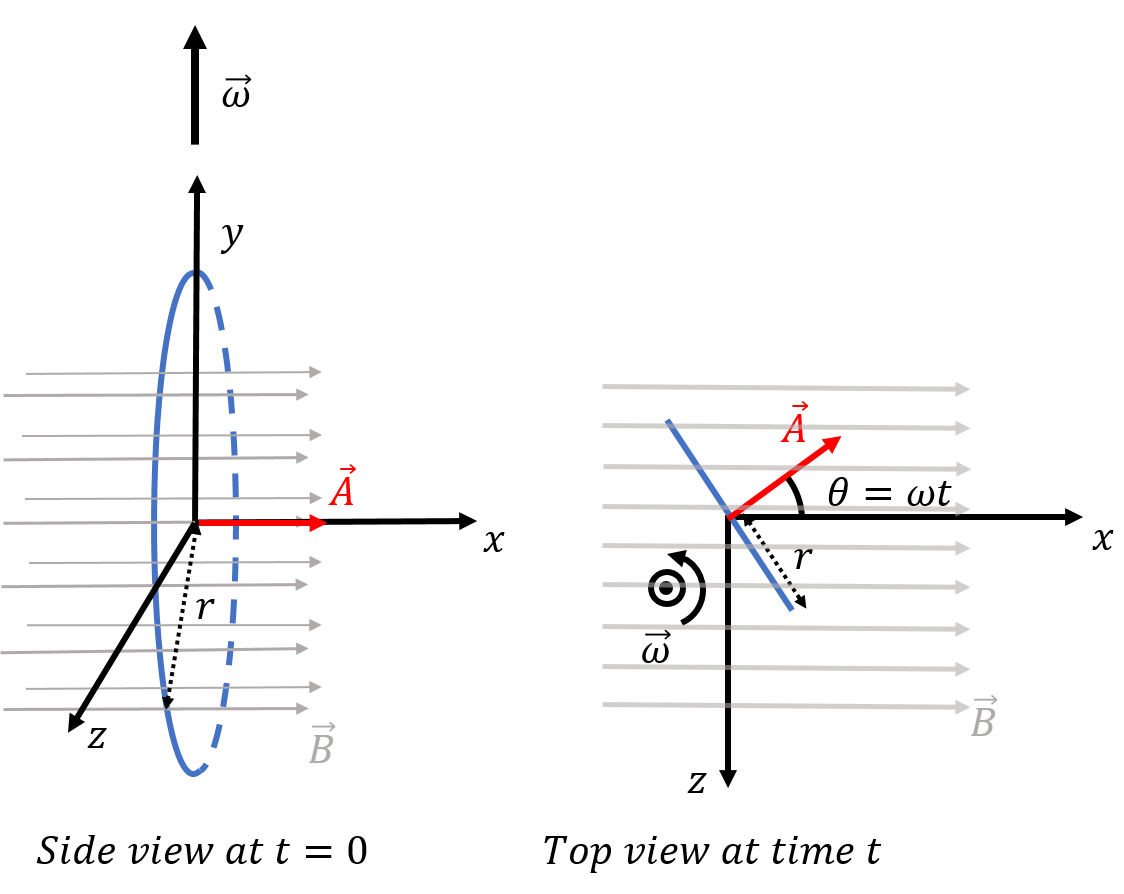
Figure 6:A loop of wire rotates in a constant and uniform magnetic field. At time (left panel), the loop lies in the plane. The loop rotates about the axis, with a constant angular velocity, . At some time later, the loop has rotated through an angle (right panel, as seen from above, looking down on the plane).
Referring to the coordinate system that is illustrated in Figure 6, the loop has a constant angular velocity, , in the positive direction and rotates about the axis (with the origin at the centre of the coil). At time (left panel), the loop lies in the plane, and we choose the vector (used to calculate the flux) to be in the positive direction at time . As the coil rotates, so will the vector , which is easier to visualize than the coil. At some time , the vector will make an angle with the axis (right panel). The magnetic field is constant and in the positive direction, . That is, the angle between the vector and the magnetic field, , will be given by .
At some time, , the vector is given by:
We can calculate the flux of the magnetic field through the loop at some time :
where we did not use the integral for the flux, since the magnetic field is constant over the area of the loop. The induced voltage is given by Faraday’s law:
If the generator includes loops in a coil, then the induced voltage is given by:
As you can see, the voltage oscillates with time, between , corresponding to alternating voltage. Furthermore, since the sign of changes with time (due to the sine function), the relative orientation between and the magnetic dipole moment of the induced current, also changes with time, indicating that the induced current in the coil changes direction every half-turn (alternating current).
The generators that produce the alternating voltages that we find in our outlets work on the same principle. For example, in a hydro-electric dam, the water pressure from the height of the dam is used to force water through a turbine (essentially a propeller) that rotates a set of coils inside of a strong permanent magnet. Various controls allow the rotational frequency of the turbine to be adjusted in order to produce alternating current of the desired frequency ( in most of the world, in North America and a few other countries).
Since the generator produces current that can dissipate electrical energy, one has to do work in order to keep the coil in the generator rotating. As the coil rotates, a current is induced in the coil. A current in a circular loop that is immersed in a magnetic field will experience a torque, , given by:
where is the magnetic dipole moment of the coil with induced current, . If the current from the coil dissipates its energy in a system with resistance, , then the current in the coil is given by Ohm’s Law:
The magnetic moment, , for the current in the coil is given by:
The torque exerted by the magnetic field on the coil with the induced current is thus given by:
Note that the torque exerted on the loop is always in the negative direction, as every term in the torque is either strictly positive () or squared (). The torque exerted by the magnetic field on the coil is thus always in the opposite direction of rotation (recall that the coil has an angular velocity in the positive direction). This is sometimes called “counter torque”. If we want the coil to maintain a constant angular velocity, then we must exert a torque in the positive direction to counter the torque from the magnetic field. Note that the torque that we must exert to keep the coil rotating with constant angular velocity is not constant in time (but always in the same direction).
You can easily verify that the work that you must do by exerting the torque is the same as the electrical power dissipated by the current in the resistor, . The generator is thus a device to convert mechanical work into electrical energy (with AC current, in particular).
22.4Back EMF in an electric motor¶
There are many similarities between electric motors and generators, and in fact, they can be thought of as the same device. In an electric motor, current is passed through a coil in a magnetic field, so that a torque is exerted on the coil, and it starts to rotate. In a generator, one exerts a torque to rotate the coil, thus inducing a current.
Consider an electric motor. As we supply current to the motor, the coil starts to rotate. But, a rotating coil in a magnetic field results in an induced current. By Lenz’s law, the induced current in the coil of a motor has to be in the direction opposite to the current that we put in, since otherwise, the motor would start to spin infinitely fast. We call this effect “back emf”, as the motor effectively acts like a battery that opposes current, as illustrated in Figure 7
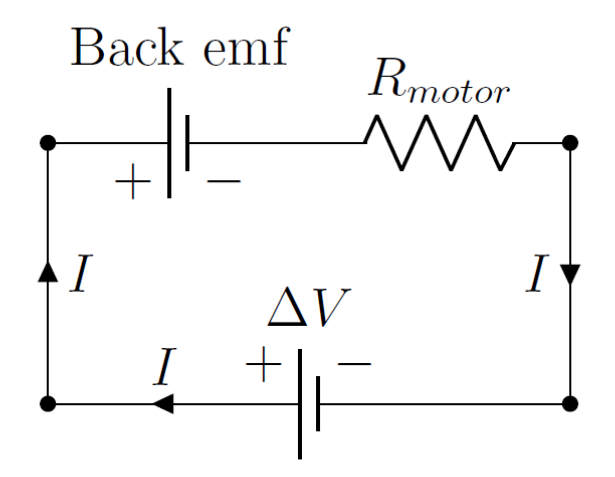
Figure 7:A simple circuit illustrating how a motor, with resistance, , will generate a “back emf”, equivalent to a battery that produces a voltage in the direction to oppose the current from the actual battery that is powering the motor, .
If you connect an electric motor to a voltage source, initially, the motor is at rest, so there will be no back emf and the current through the circuit will be very large (motors have a small resistance, so that the electrical energy is converted into work rather than heating up the motor). As the motor starts to spin faster, the back emf from the motor grows, reducing the current in the circuit. If there is no load on the motor (i.e. the motor can rotate freely with no friction), then the rotational speed of the motor will increase until the back emf exactly matches the voltage supplied to the motor. The motor will then rotate at constant speed, with (almost) no current in the circuit (if the motor slows down, the emf will decrease, and the current will increase to speed up the motor). If there is a load on the motor (because it’s making something turn), then the motor will rotate at a speed that is lower than that which would result in zero current, since some of that current is now used by the motor to exert a torque.
You may notice that the lights in your house dim briefly as your refrigerator turns on. This is because your refrigerator uses an electric motor that initially draws a large current when it turns on, large enough to produce a voltage drop in the circuit of your house to observe a dimming of your lights. You may also notice that if you plug the inlet or outlet of a hair dryer, the hair dryer turns off quickly. In this case, by blocking the flow of air, you prevent the motor in the hair dryer from rotating; this results in a large current through its coil, since there is no back emf. Most hair dryers have a circuit breaker that will detect this large current and open the circuit to prevent the coil in the motor from over heating and melting. In general, one should not prevent an electric motor from rotating, as this will result in a large current through the motor that could melt its internal components.
22.5The induced electric field and eddy currents¶
So far, we have described electromagnetic induction in terms of the voltage that is induced by a changing magnetic field. This voltage is related to an electric field, which we discuss in this section. In Faraday’s Law, the voltage is induced across a closed loop (and can be thought of as an ideal battery placed in the loop). This is illustrated in Figure 8 which shows a loop in the plane of the page, and a magnetic field out of the plane of the page.
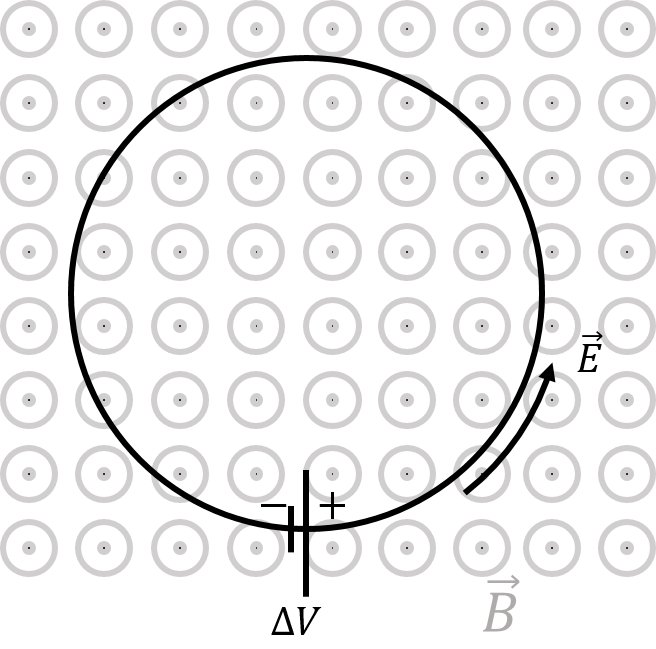
Figure 8:A varying magnetic field will induce a circular electric field.
As you recall, the electric potential difference between two points, and , is obtained from the electric field:
In the case of an induced voltage across a loop, the points and are the same. The integral is thus over a closed path:
We can include this into Faraday’s law by using the electric field instead of the potential difference:
where the last line is a more general form of Faraday’s law. Note that in the case of electrostatics, where the electric field is produced by a distribution of charges, the integral must be zero, since the electric force is conservative; the work done by the electric field on a charge over a closed path, which is just a charge multiplied by that integral, must be zero. The force from an electric field that is induced by a time-varying magnetic field is not conservative!
Faraday’s law as expressed with the electric field is much more general, and implies that a time-varying magnetic field will induce an electric field. This is true, independently of there existing a physical wire to carry the induced current.
22.5.1Magnetic braking¶
When a conducting material moves into a region of magnetic field, an electric field forming closed loops is induced in the material, thus inducing small current loops, called “eddy currents”. The magnetic field can then exert a force on those currents, effectively resulting in a force on the material. This is the principle behind magnetic braking, which is used in some trains and in other applications.
Figure 10 illustrates how a magnetic brake can be used to slow a rotating wheel made of a conducting material (the material must conduct or the induced electric field will not produce any current). A magnetic field is produced (e.g. by a fixed permanent magnet) in a direction perpendicular to the wheel, over a small area (shown at the bottom of the wheel in Figure 10).
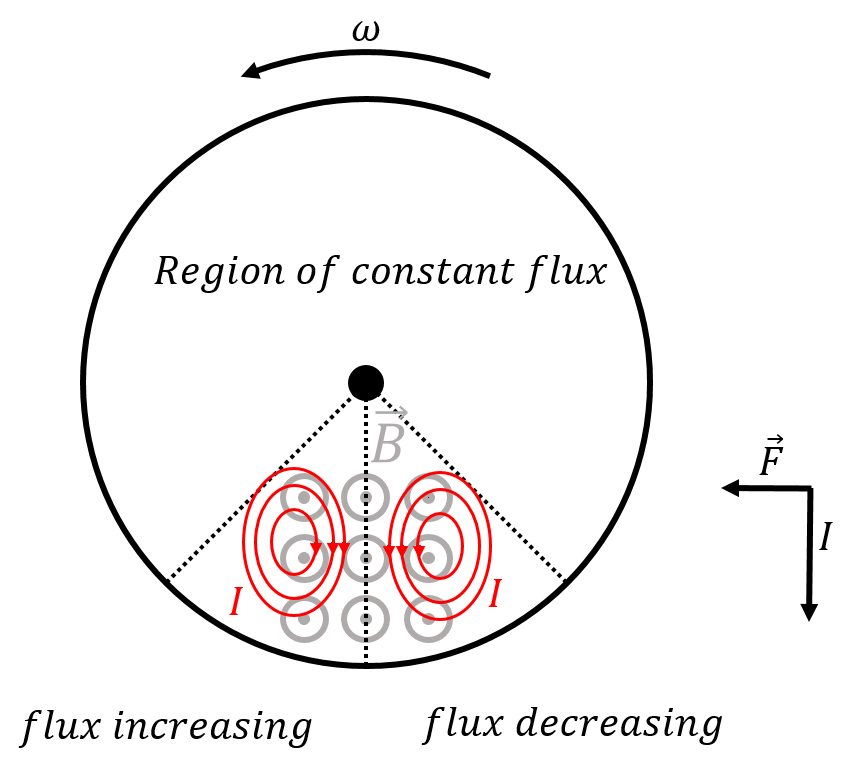
Figure 10:A rotating wheel made of a conducting material has a small region with a magnetic field. The eddy currents in the region of changing flux result in a net downwards current at the centre of the region. The magnetic force that is exerted on that current slows down the wheel.
For material located at the bottom left of the wheel, the magnetic flux is increasing, since the material is moving from a region with no magnetic field into a region with a magnetic field. In that part of the region, clockwise eddy currents will form, as those result in a magnetic field into the page, to counter the increasing magnetic flux (Lenz’s law). The bottom right side of the wheel is leaving the magnetic field, and will thus have eddy currents in the opposite direction. The currents from both sides add up in the centre, resulting in a net downwards current. The magnetic force on that downwards current is to the left, resulting in a torque that slows the wheel. This is magnetic braking.
Again, this is no more than conservation of energy at play. Since we induce currents by making the wheel move into/out of a region of magnetic field, the electrical energy in those currents must come from somewhere (either we do work to keep the wheel rotating, or the wheel loses kinetic energy). Any time that we try to move a conductor through a magnetic field, in a way that current is induced, we will have to exert a force and do work. In the case of magnetic braking, the wheel will convert its rotational kinetic energy into heat (the eddy currents will heat up the wheel). The main issue with magnetic braking is that one needs to be able to dissipate the heat. The main advantage is that there are no parts that wear out, as opposed to braking with friction. In addition, magnetic braking is very smooth, and only acts when there is motion. As soon as the wheel stops rotating, the magnetic flux is constant everywhere and the eddy currents disappear.
22.6Transformers¶
The electric power generated in power stations is transmitted using high-voltage transmission lines, typically with voltages above for long distances. However, that voltage is not usable in our households, as our appliances expect a voltage around (or in Europe). Transformers use electromagnetic induction to transform one alternating voltage into another. Figure 11 illustrates a transformer.
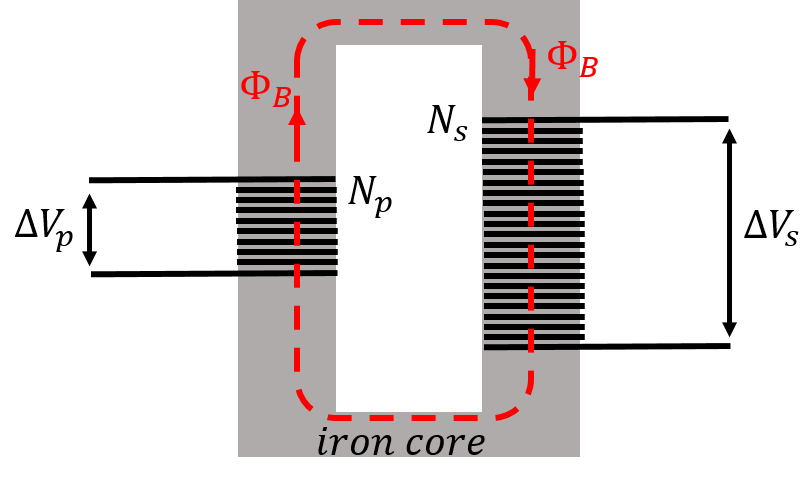
Figure 11:A transformer converts a primary alternating voltage, , to a secondary alternating voltage, . The magnetic flux produced in one coil is transmitted by an iron core to the secondary coil, where a different voltage is induced, depending on the ratio of the number of windings in each coil.
The transformer has two coils, the “primary” and the “secondary”, with different numbers of loops, and , respectively. The coils are wrapped around an iron core, which can transmit the magnetic flux generated in the primary coil to the secondary coil. In the transformer, an alternating voltage, , is applied to the primary coil, and transformed into the desired voltage, , in the secondary coil.
The current in the primary coil creates a magnetic field. Those field lines are transmitted by the iron core into the second coil. A voltage is only induced in the secondary coil if the magnetic flux through the secondary coil changes with time. Thus, transformers only work with alternating voltages, so that the magnetic field created by the primary coil changes continuously. Both coils will have the same magnetic flux, , through them, since they have the same area. The voltage in the primary coil is given by Faraday’s law:
as is the voltage in the secondary coil:
Since the flux (and thus its time-derivative) are the same in both coils, we can isolate the time-derivative in each equation to obtain the relationship between the voltages in the two coils:
Thus, with a transformer, one simply needs to set the ratio of the number of loops in each coil in order to transform one voltage into another.
22.7Maxwell’s equations and electromagnetic waves¶
This section is meant to be informative, as the material is beyond the scope of this textbook. Nonetheless, it is worth summarizing what we have learned about electricity and magnetism, as Maxwell did. We can summarize the main laws from electromagnetism as follows:
where we wrote the magnetic flux in Faraday’s law using the integral explicitly. As you recall, Gauss’ Law is equivalent to Coulomb’s Law, relating the electric field to electric charges that produce the electric field. Although we did not explicitly use the second equation, it is the equivalent to Gauss’ Law for the magnetic field. The flux of the magnetic field out of a closed surface must always be zero, since there are no magnetic monopoles, so that magnetic field lines never end.
When we covered Ampère’s Law, we only considered a static current as the source of the magnetic field. However, if there is an electric field present that is created by charges that are moving, then those can also contribute a current to Ampère’s Law:
so that Ampère’s Law, in its most general form, is written:
Writing out the four equations again:
These four equations are known as Maxwell’s equations, and form our most complete theory of classical electromagnetism. It is quite interesting to note the similarities and relations between the electric and magnetic field. Maxwell’s equations contain equations for the circulation and the total flux out of a closed surface for both fields. Ampère’s Law implies that a changing electric field will produce a magnetic field. Faraday’s law implies that a changing magnetic field produces an electric field. If a point charge oscillates up and down, it will produce a changing electric field, which will produce a changing magnetic field, which will induce a changing magnetic field, etc. This is precisely what an electromagnetic wave is! The light that we see, the Wi-Fi signals for our phones, and the highly penetrating radiation from nuclear reactors are all examples of electromagnetic waves (of different wavelengths).
In fact, as Maxwell did, we can obtain the wave equation (Section 13.3.1) from Maxwell’s equations. We sketch out the derivation here, but it is definitely beyond the scope of this textbook. However, you’re so close to seeing one of the most exciting revelations of physics that it would be a shame to skip it!
We first write out Maxwell’s equations in differential form, as we have already shown for Gauss’ Law ((Section 16.5) and Ampère’s Law ((Section 21.4.1)
If we consider a vacuum region in space, with no charges and no currents, these equations reduce to:
We will make use of the following identity from vector calculus:
where:
is called the “vector Laplacian”.
Consider taking the curl () of the equation that has the curl of the electric field (Faraday’s law):
where, in the third line, we made use of Gauss’ Law (), and, in the fourth line, Ampère’s Law (). The last equation that we obtained is a vector equation (the vector Laplacian has three components, as does the time-derivative of on the right-hand side). Consider the component of this equation:
If we define the quantity:
then, the component of the equation can be written as:
which is exactly the wave equation for the component, , of the electric field, propagating with speed , the speed of light! Thus, the speed of light is directly related to the constants and . You can write out similar equations for the and components of the electric field, and find the similar equations for the magnetic field if you start by taking the curl of Ampère’s Law instead of Faraday’s law.
We have just shown that electric and magnetic fields can behave as waves, which we now understand to be the waves that are responsible for light, radio waves, gamma rays, infra-red radiation, etc. All of these are types of electromagnetic waves with different frequencies. Although we did not demonstrate this, the electromagnetic waves that propagate are such that the magnetic and electric field vectors are always perpendicular to each other. Electromagnetic waves also carry energy. Thus, a charge that is oscillating (say on a spring) and creating an electromagnetic wave must necessarily be losing energy (or work must be done to keep the charge oscillating with the same amplitude). Finally, it is worth noting that, according to Quantum Mechanics, light (and the other frequencies of radiation), are really carried by particles called “photons”. Those particles are strange, since their propagation is described by a wave equation.
22.8Summary¶
Faraday’s law connects a changing magnetic flux to an induced voltage:
The magnetic flux, , is calculated as the flux of the magnetic field through an open surface, :
The induced voltage, , is the potential difference that is induced along the closed path (a “loop”) that bounds the surface, . If a charge, , were to move around that closed path, it would gain (or lose) energy, . Note that the potential difference that is induced corresponds to a non-conservative electric force, as a charge can gain/lose energy by moving along a closed path. The induced voltage is often called an induced electromotive force (emf), even if it is a voltage.
The minus sign in Faraday’s law is sometime referred to as “Lenz’s law”, since it indicates in which direction the induced voltage will be. It is easiest to think of the closed path as a physical wire (e.g. a loop of wire) through which a current will be induced as a result of the induced voltage. The minus sign is easiest to interpret in terms of the relative direction between the area vector used to define the flux, and the magnetic dipole moment vector, , associated with the induced current (which points in the same direction as the magnetic field that is produced by the induced current).
When calculating the flux of the magnetic field, the surface element vector , must be perpendicular to the surface through which the flux is calculated, which leads to two possible choices. Once a choice is made, and Faraday’s law has been applied, the sign of will indicate if the magnetic dipole moment of the induced current points in the same direction as (positive ) or in the opposite direction (negative ).
If loops of wire are combined together into a coil, the voltages across each loop sum together, so that the voltage induced across the coil is given by:
Lenz’s law is a statement about conservation of energy. Indeed, the induced current must create a magnetic field that opposes the change in flux, otherwise, the induced current would grow indefinitely. Lenz’s law can be summarized as follows:
If the magnitude of the magnetic flux is increasing in the loop, then the induced current produces a magnetic field that is in the opposite direction from the original magnetic field.
If the magnitude of the magnetic flux is decreasing in the loop, then the induced current produces a magnetic field that is in the same direction as the original magnetic field.
A voltage is induced along a closed path any time that the flux of the magnetic field through the corresponding surface changes. The flux can change either because the magnetic field is changing, or because the loop is changing (in size or orientation relative to the magnetic field). In the latter case (changing loop), one speaks of a “motional emf”. A generator creates a motional emf by rotating a coil (with loops, each with area, ), inside a fixed uniform magnetic field, . The voltage produced by a generator is given by:
where is the angular speed of the coil. A generator thus produces alternating voltage/current. The current that is induced in the coil of the generator will dissipate energy as it flows through a resistance, . Thus, one must do work in order to keep the generator spinning. The current induced in the coil of the generator will also result in a magnetic moment, and a “counter torque” will be exerted on the coil. One must thus exert a torque in order to keep the generator spinning (and the work done by exerting that torque is converted into the electrical energy dissipated in the resistor). The counter torque on the generator is always in the same direction, and has a magnitude:
When an electric motor is used, a “back emf” is induced in the coil of the motor. The back emf is such that it resists the direction of current (Lenz’s law), or else the motor would spin infinitely fast. As the motor spins faster, the back emf grows, until it reaches an equilibrium. Motors thus draw a large current when they first start up, since at low speed, they have no back emf.
Since a changing magnetic flux induces a voltage, an electric field is also induced. We can replace the voltage in Faraday’s law with the circulation of the electric field to write a more general version of Faraday’s law:
The induced electric field forms closed field lines, and is different than the electric field that is produced by static charges, since the latter will have field lines that start and end on charges. The force associated with the induced electric field is not conservative.
When a metallic object passes through a region of magnetic field, the induced electric field will induce current loops in the material called eddy currents. The magnetic field will also exert a force on these eddy currents to oppose the motion that is creating the currents (Lenz’s law); as the eddy currents dissipate electrical energy in the material, the metallic object must lose kinetic energy unless a force is acting on it. Magnetic brakes make use of this principle.
Transformers are used to convert an alternating voltage, , into a different alternating voltage, . A “primary” coil, with windings, creates a changing magnetic flux that is guided (e.g. by an iron core) to a “secondary” coil, with windings. The voltage induced in the secondary coil is given by:
Maxwell’s four equations form our best classical theory of electromagnetism. Those equations imply that a changing magnetic field produces an electric field (Faraday’s law), while a changing electric field can produce a magnetic field (Ampère’s Law). By combining Maxwell’s equation (with some heavy vector calculus), one can show that this leads to the formation of electromagnetic waves, that propagate with a speed, , given by:
22.9Thinking about the material¶
22.10Sample problems and solutions¶
22.10.1Problems¶
22.10.2Solutions¶
Solution 22.1
This is identical to the motional emf that is generated by a bar moving in a magnetic field. As the airplane moves as illustrated (towards the left, in an upwards magnetic field), the electrons in the wing of the airplane will be pushed into the page. Eventually, the electric field from the electrons will prevent further electrons from accumulating at that side of the wing, and there will be a constant (Hall) voltage, , across the wing tips. This will happen when the magnetic and electric force are equal and opposite:
where is the wingspan of the airplane. The induced potential is thus given by:
Solution 22.2
22.10.3Exercise Solutions¶
Solution to Exercise 1 #
a. ;
b. The field points in and is increasing, so by Lenz’s law the induced current must produce a field in to oppose the change. By the right-hand rule, the current flows clockwise when viewed from .
c. The rate of change is twice as large, so and . Now the field is decreasing, so the induced current reverses to counter-clockwise.
Solution to Exercise 2 #
a. ;
b. The field points in and is increasing. By Lenz’s law the induced current must create a field in , so by the right-hand rule the current is clockwise when viewed from .
c. The rate of change of flux doubles (since instead of ), so the induced voltage doubles to and the induced current doubles to .
Solution to Exercise 3 #
a. ;
b. . By the right-hand rule (downward current in bar, field out of page), the force points to the left — opposing the bar’s motion, consistent with Lenz’s law.
c. To maintain constant velocity, the applied force must equal to the right. Mechanical power: . Electrical power: . The two are equal, confirming energy conservation.
Solution to Exercise 4 #
a. Inside (): , so
b. Outside (): , so
c. The field in is decreasing, so by Lenz’s law the induced field must circulate in a direction that would drive a current reinforcing the flux (in ). By the right-hand rule, that circulation is counter-clockwise when viewed from . A positive charge at would therefore be accelerated counter-clockwise.
Solution to Exercise 5 #
a.
b.
c. ; . Check: . ✓
Solution to Exercise 6 #
a. ;
b. ; fraction (). Transmission at high voltage loses less than of the total power.
c.
Recall that this ambiguity is resolved when using Gauss’ Law by always choosing to point “outwards”, which only makes sense when the surface is closed. With an open surface, there is no inside or outside, and we are left with the ambiguity.